Over the holidays, I tried to fix my Roomba Scheduler. I ended up deciding not to try to trace from the battery connector to locate what part had shorted/burned when I connected a rebuilt battery with reverse polarity, I found an eBay seller with remanufactured main boards, and I ordered one for $20.
Yesterday I had time to swap it out and get Roomba working again.
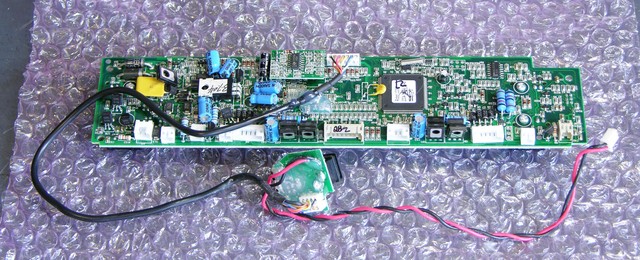
Board Replacement
I had the new board completely mounted and half the connectors wired up when I noticed the first problem:
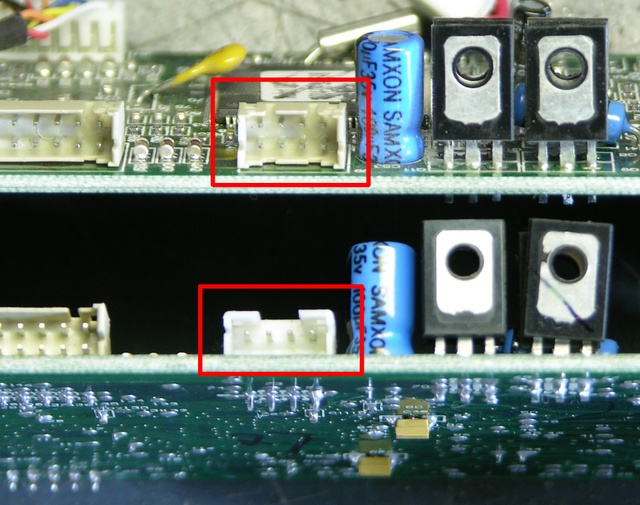
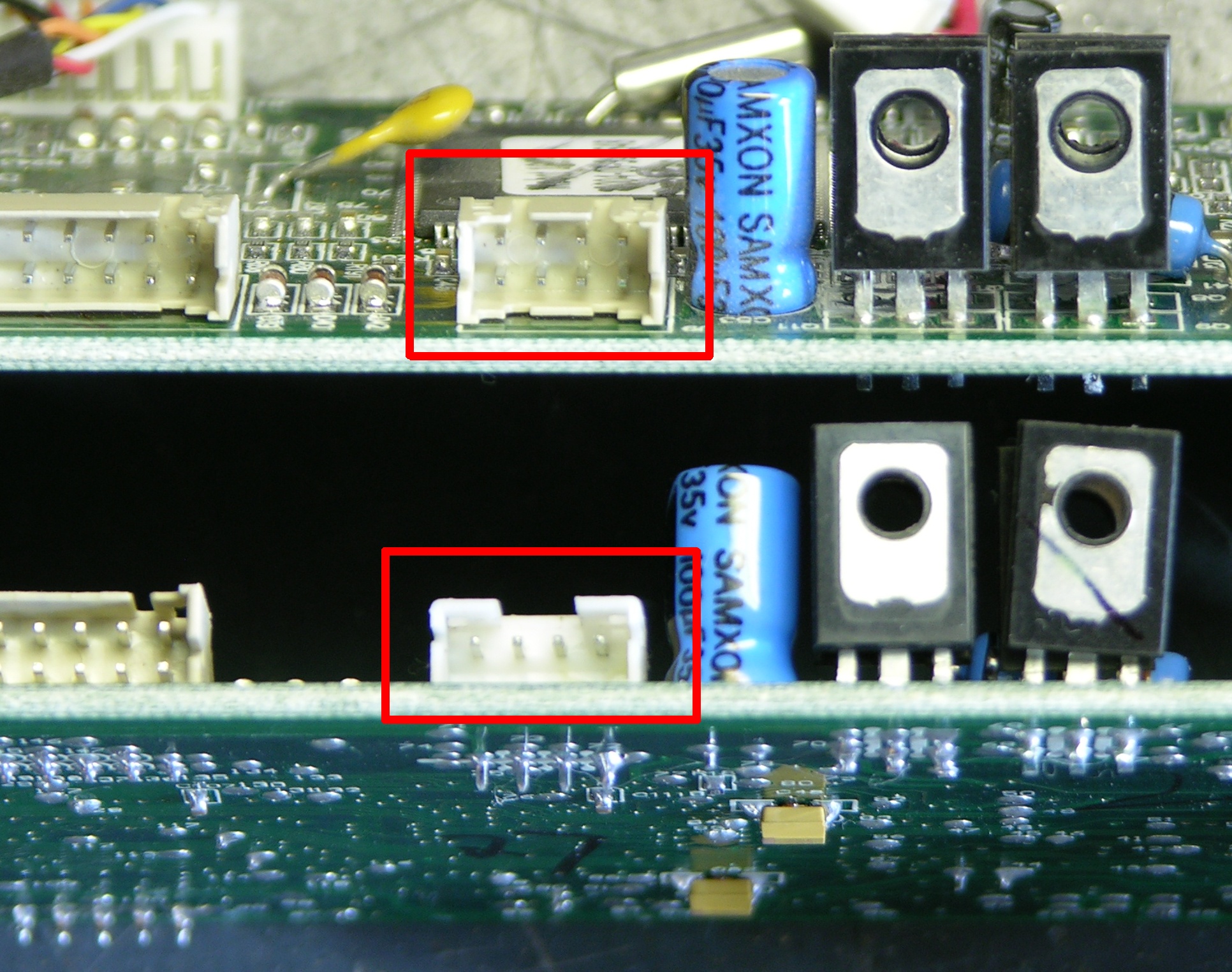
My Roomba has two dirt detectors, and J9 has two rows of pins, one row to each piezo assembly. The refurbed MB had a single-row J9, apparently from an earlier model with a single dirt detector.
I debated a bit about contacting the seller, but decided it was a waste of his time and mine to ask for a replacement board when I had everything I needed already at hand. I desoldered J9 from my original board (tedious heat-tug-heat-tug-heat-tug that demonstrates how good J9′s plastic is because it didn’t melt and how good the PCB is because the only thing I ruined was one of the test points), and had a much easier time desoldering the single-row J9 from the new board.
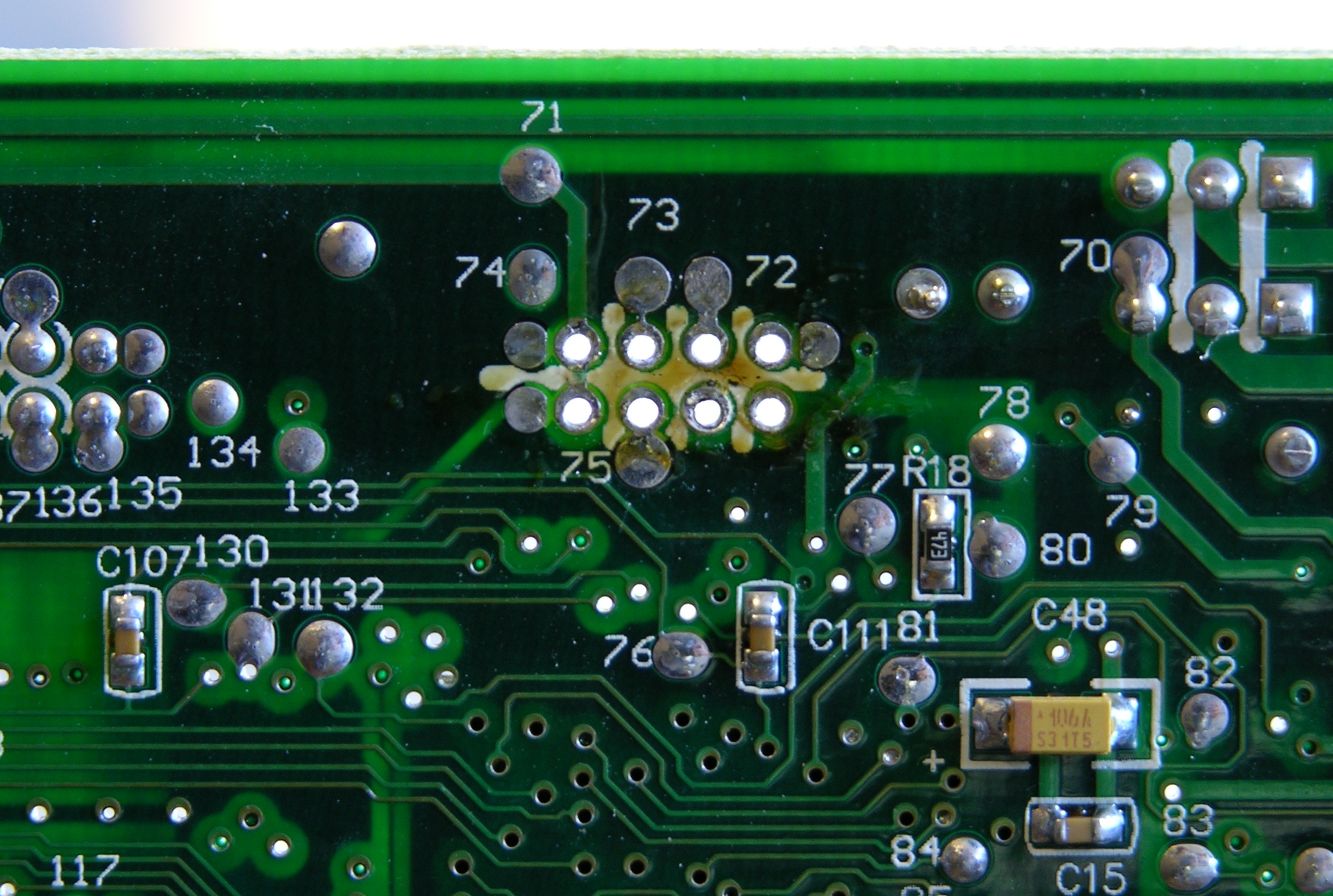
Then I got frustrated trying to get the solder out of the through holes. I had some success adding solder to the holes and applying solder wick, but there were three holes I just couldn’t get. Finally I gave up and pulled out the PCB drill bit set — a #68 bit spun gently by hand turns out to be just the ticket for cleaning the solder out of these holes. (Never again will I try to wick solder out of empty holes.)
I cleaned the two-row jack’s leads with a wire brush, soldered it in, took a picture from an angle that looks like I still have the single-row jack in the board, and reassembled Roomba.
Attempt #1
I was delighted to see it turn on when I pressed the power button. I knew that should be what would happen, but it was still gratifying to see it actually happen.
Prematurely. Gratifying.
I took it to the living room to vacuum, hit Clean, and it just burped. It burped when I hit any button. Grrrr.
Diagnostics and Cliff Sensors
The first page I found when searching for why it was “burping” was What is Roomba saying to me?, which says that the “eh” sound means there’s a faulty cliff sensor.
I relocated the Roomba Discovery models’ diagnostic tests page and ran through the individual sensor diagnostics. On test 2, outer cliff sensors, only the starboard-most sensor worked properly; the outer port sensor showed “cliff” all the time. On test 3, both inner sensors showed “cliff” all the time.
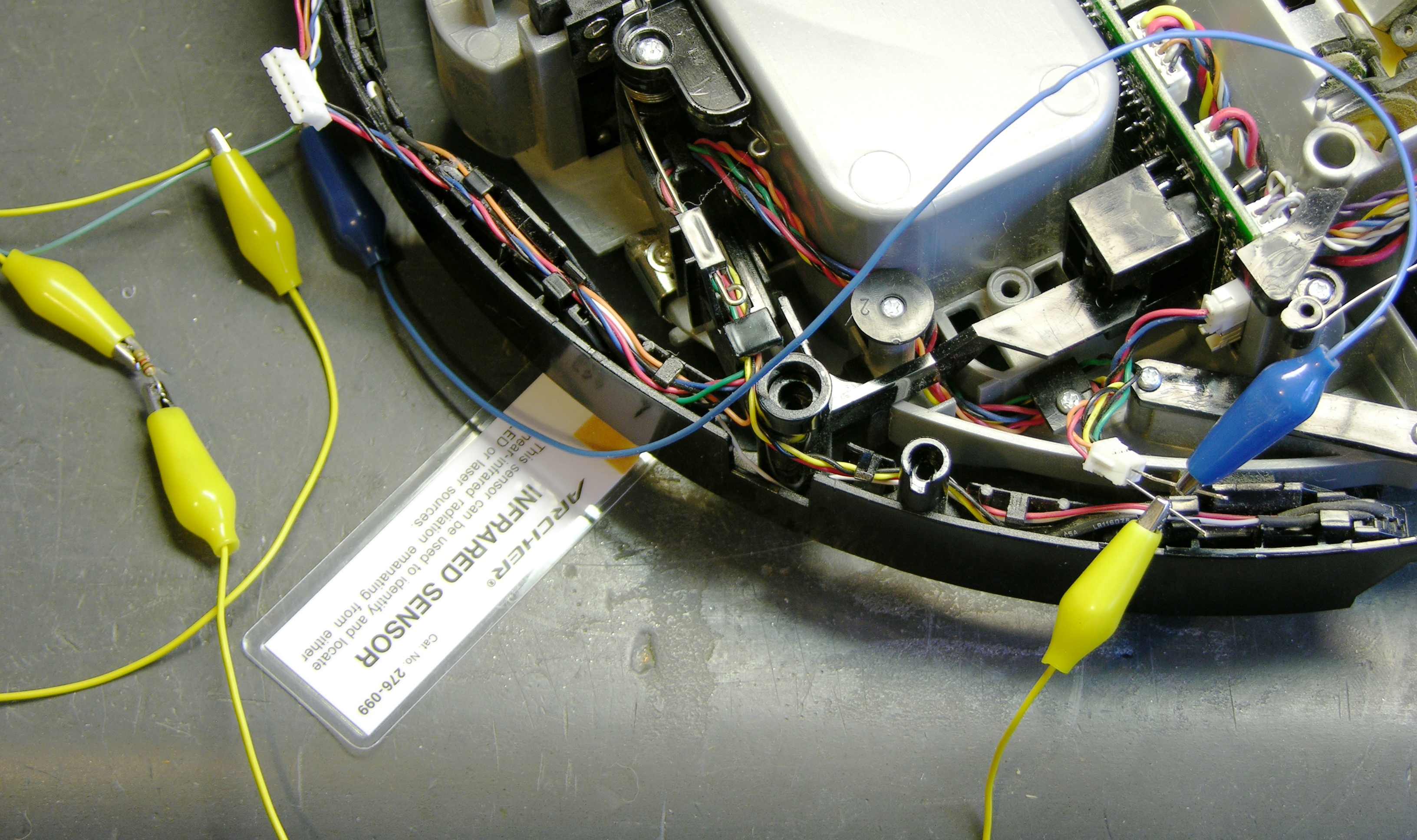
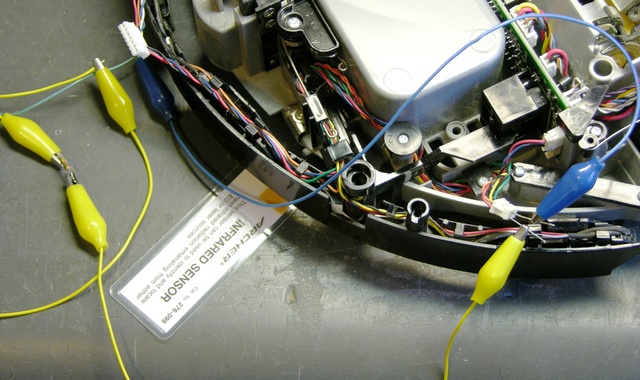
Gathering more test materials and retesting, I found that only the outer starboard sensor’s IR LED was lighting my infrared sensor card (apparently no longer sold at Radio Shack, but apparently formerly part number 276-099 and/or 276-1099), and the cliff-sensor IR LEDs were dark. Further, shining the virtual wall’s IR LED beacon into the cliff sensors caused the diagnostic LEDs to flicker, indicating that the cliff-sensor IR detectors (phototransistors or photodiodes) were working properly, so the problem definitely seemed to be in the LEDs.
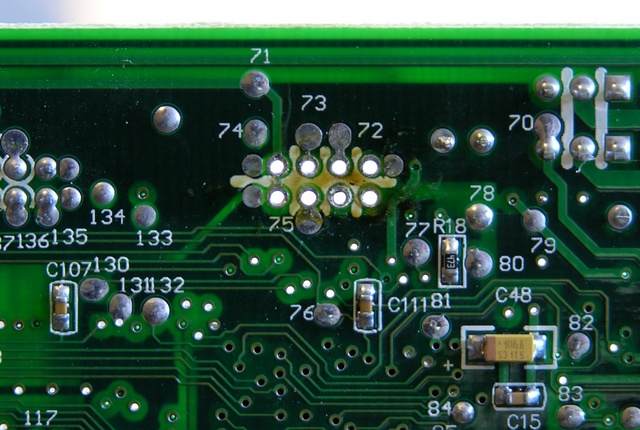
All three of the dark LEDs individually checked good with the diode tester on my multimeter. Tracing the cliff sensors’ LEDs, I found that the three dark ones were all powered in a single series circuit, fed by the red (anode) and orange (cathode) wires in the top row of J24 at the port end of the main board.
My meter’s diode tester didn’t use a high enough voltage to overcome the forward voltage drop of the series string, so I hooked my bench power supply to a 1KΩ resistor and the series chain. All the LEDs now glowed on my IR sensor card, so the LEDs weren’t faulty (which I had assumed anyway) — the problem was with the driver.
Robot Reviews Forum and Q4 LED Driver
Searching online for advice, I quickly found this forum post titled “Cliff sensor failure apart from one” complaining of exactly the same problem. “Gordon,” a very knowledgeable contributor, indicated that the dark LEDs were all driven by the same transistor, Q4.
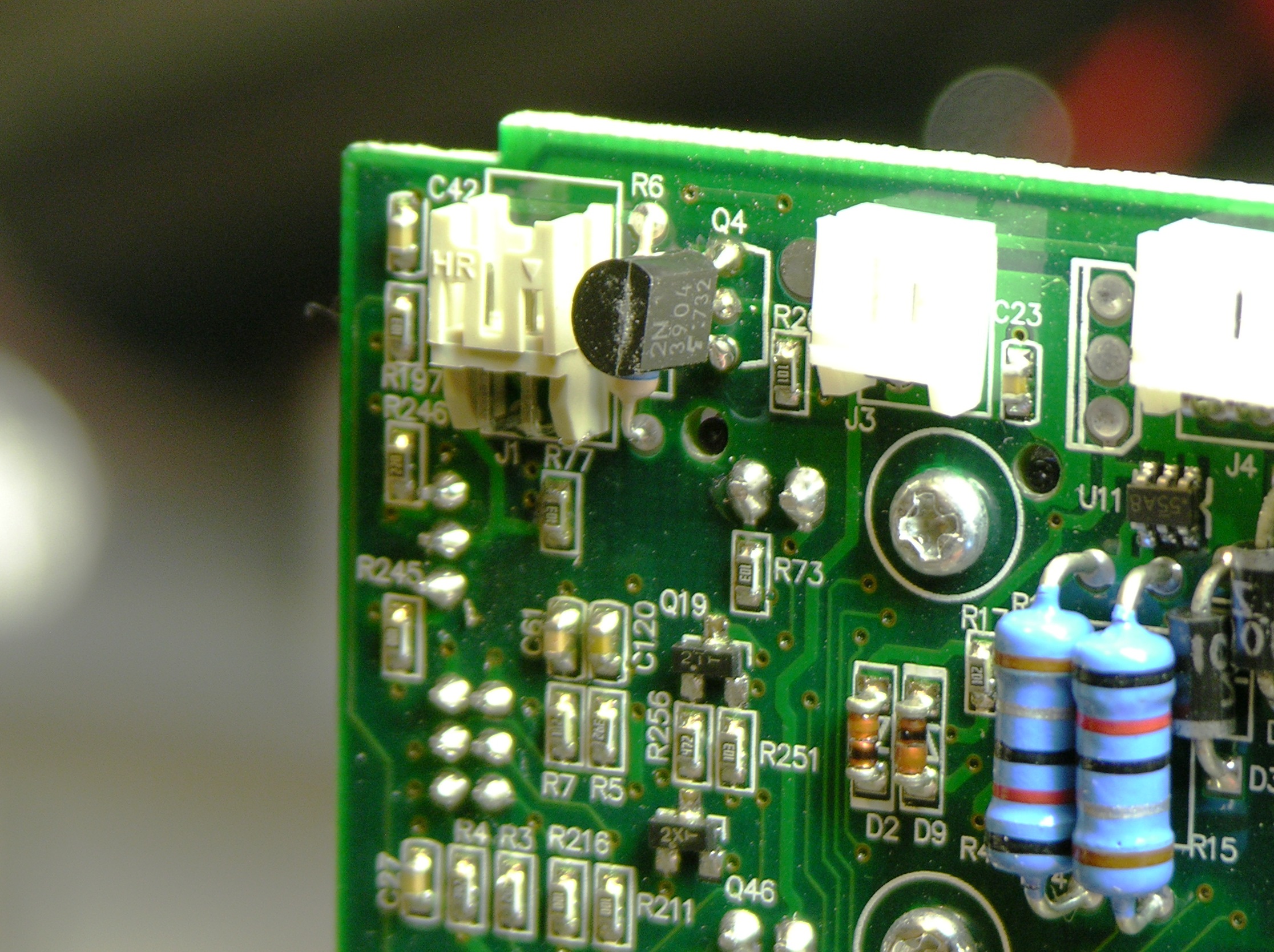
I found Q4 on the board and it was twisted, so I straightened it without particularly thinking. (This fact isn’t relevant yet. Just wait.)
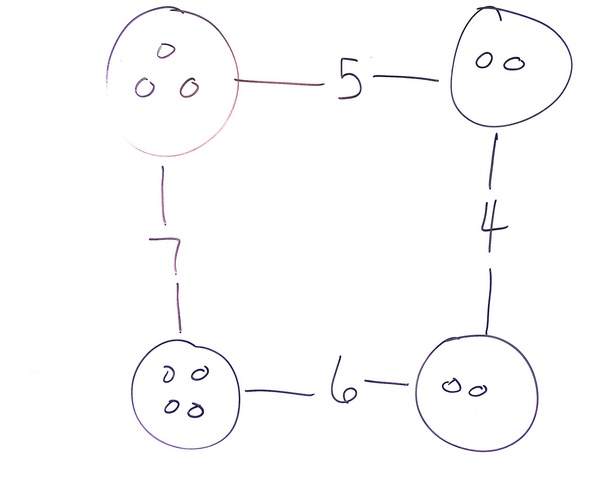
Gordon indicated which MB test points correspond to which Q4 pins, provided an apparently reverse-engineered and incredibly helpful schematic of the cliff-sensor LED drive system, and indicated that the Q4 and Q37 bases should have a 1kHz square wave on them, with a corresponding signal on the collectors.
I put the scope on Q4 and its base was oscillating nicely, but its collector stayed high. This made me suspect a faulty Q4, so I quickly and cleanly desoldered it and checked it in my out-of-circuit transistor tester. The tester said it was good with a β of about 220, which wasn’t what I wanted to see. I wanted it to be broken.

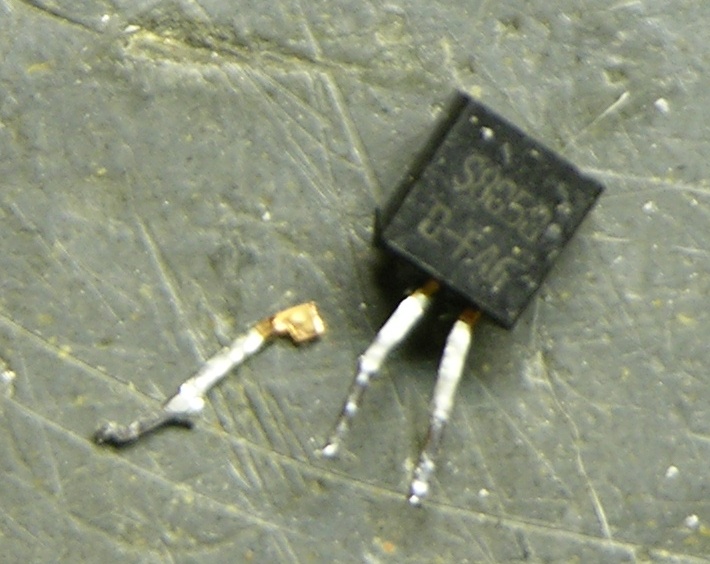
And then while I was straightening the leads and pondering what to do next, the emitter leg felt loose and I pulled it out with my fingers. Removed, it looked rather like a dessicated cricket leg you’d find in a corner.
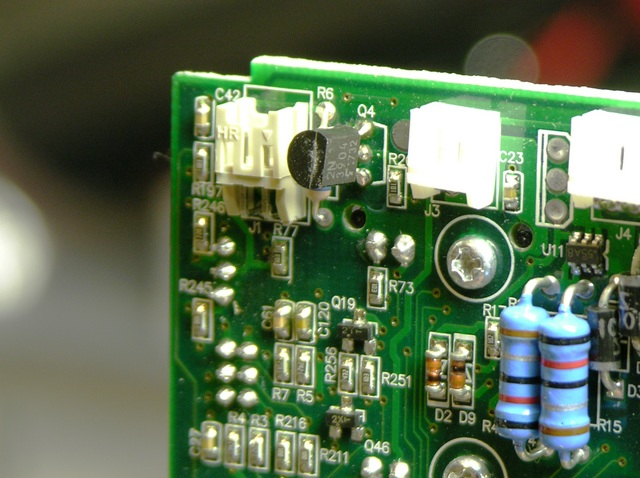
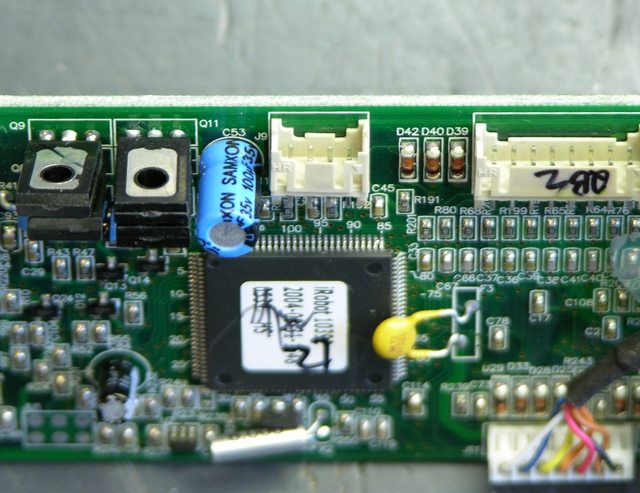
I don’t have SS8050s on hand (that I know of), but they’re all over the MB and appear to be used as general-purpose transistors. I found a 2N3904 with the same pinout in my parts bin (if you think all TO-92 transistors with the same part number have the same pinout, you haven’t shopped enough different manufacturers), tested about the same β, installed it, and the IR LEDs all glowed.
I could have pulled an SS8050 from my original MB, but (1) I wanted to keep it intact, and (2) I wanted to demonstrate that another transistor would work. And so it did!
Sweet, Sweet Success

Roomba powered up again, but this time it didn’t burp (I mean “eh”) when I hit buttons, and it went straight into cleaning mode. Woo-hoo! I took it to the living room and let it clean, and it ran the course and picked up all the cat hair.
Today I emailed the eBay seller just to let him know what had happened. I wasn’t upset and I left him all positive feedback because the board he sold me fixed my problems within my abilities, plus I may have broken Q4 myself while straightening it, plus I had some fun tracing the problem. But I thought he should know what happened so he could check future boards more carefully for customers less fascinated by the process of repair.
He replied:
wow, yes you went above and beyond what I would expect. Thanks for helping out, i’m sorry you had to do so much.
sounds like the glass is half full with you.
There may be some truth to that.