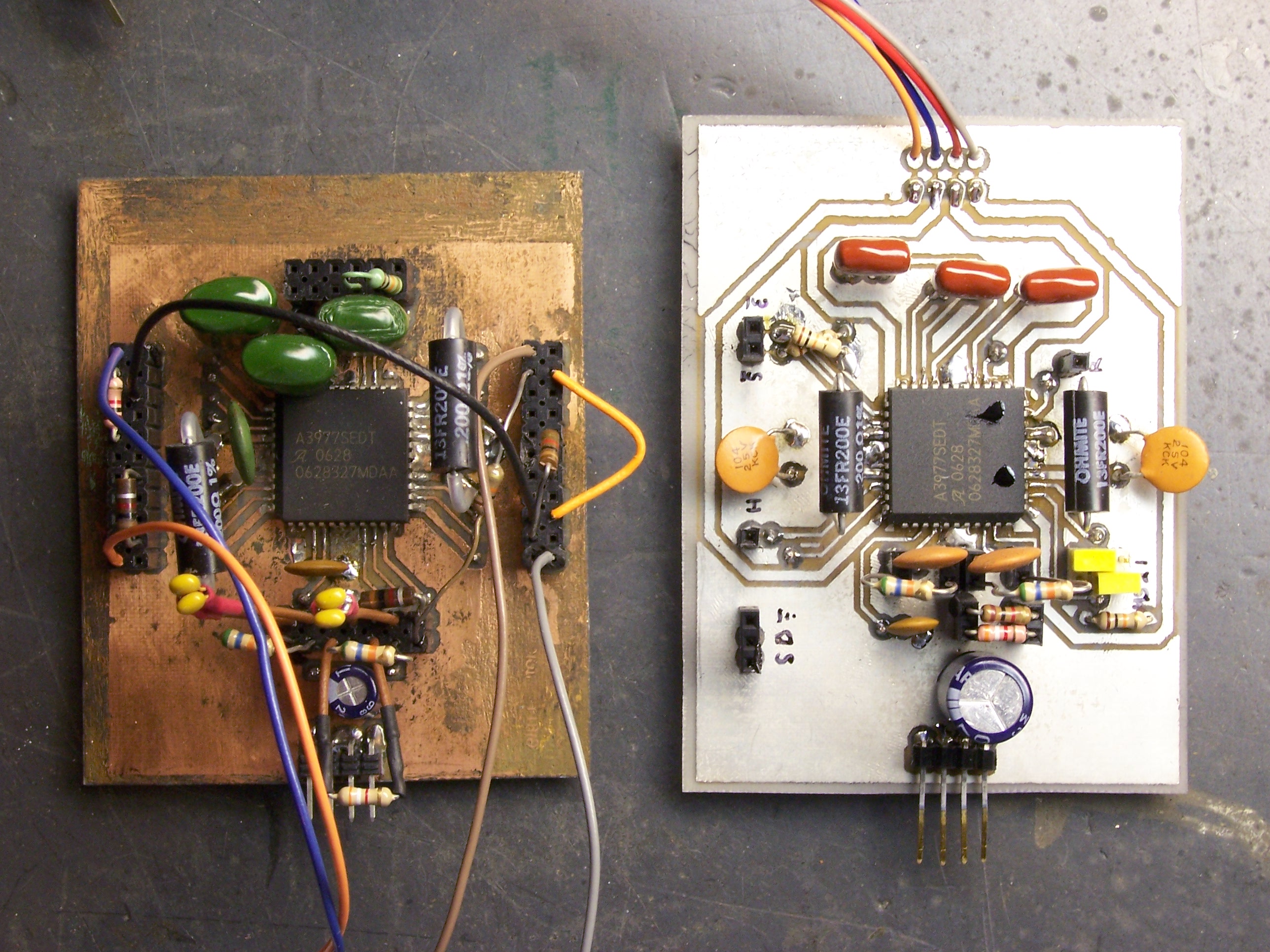
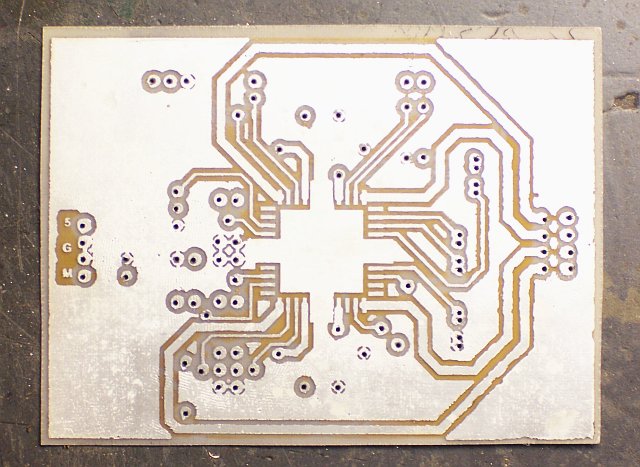
What’s the difference between these two boards?
- The one on the right is prettier.
- The one on the left has the driver chip soldered in the correct orientation.
- The one on the left still has the magic smoke.
What’s the difference between these two boards?
Tinnit is a tin-plating solution for coating copper PC boards. It dissolves in water and plates boards without electricity (which standard electroplating requires). The silvery coating prevents the copper from oxidizing, and also takes solder more easily than even clean, bare copper.
I’ve had an unopened package in my PCB-making kit for about eighteen years now. The problem is, once mixed, it has only a six-month shelf life, and I’ve never expected to make enough boards within six months to be worth using up the package.
Yesterday I finally took the plunge, and I’m rather impressed. Everything I did all day worked out pretty well . . . so let me get to the Tinnit in my usual roundabout way. ![]()
I borrowed a DC power supply from the class lab to test my stepper driver on 24V and 30V load supply. I had got up to 2300 steps per second on 18V, and I hit 2700 steps per second at 24V and ran out of speed on my controller. I’m not using the Arduino’s PWM outputs yet, and 2700 steps / second seems to be about as fast as my program goes using software-based stepping.
I’ve been running the motor in half-step mode because it’s noticeably smoother, at least at lower speeds. But that also means I only get half the motion for each step signal I send. For the sake of testing top speed, I rejumpered the driver board for full-stepping and tried again.
The motor was immediately jerky and twitchy, like it had been with inductive sense resistors. Not only was the top speed drastically lower, but it took great care to ramp up to the top attainable speed. I jumpered back to half-stepping — and the problem didn’t go away. I checked all my connections, measured parts of the circuit, swapped the motor, put a scope on the sense resistor terminals — no go.
I broke it. Still don’t know how.
I’d been planning to build another driver board soon anyway, to drive a second axis prototype. With my first board misbehaving, I could also use the second board to help troubleshoot the first.
I also had a list of changes to make — things that were inconvenient about my first A3977 breakout board. I updated my layout Saturday with (among other things) nice jumpers for option settings, better grouping of signal inputs and outputs, and less reliance on having to solder leads on both top and bottom sides to carry signals through unplated vias.

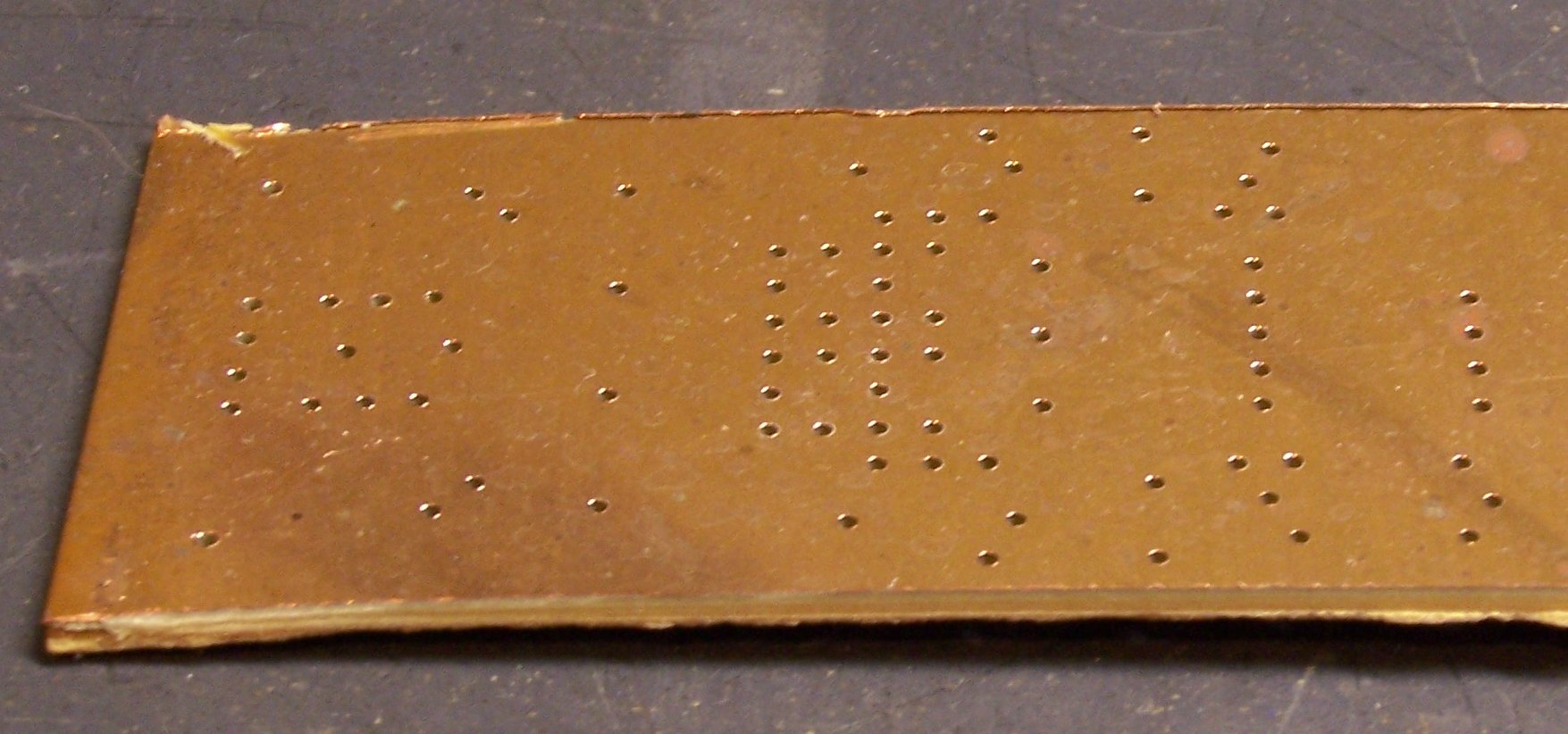
Normally I’d use Joel’s CNC machine to drill my board, but the timing didn’t work out this weekend. Instead, to prepare for hand-drilling, I taped together two sheets of my thin double-sided board stock with a printout of the top-side copper pattern and used a center punch to mark the holes.
Alas, I was a bit overzealous with the center punch.

The dimples went through both boards in the stack. Yeah, thin board stock.
I drilled the holes carefully with a #71 bit, then used a hammer to flatten the dimples on the anvil surface of my bench vise. Apparently I did a good enough job, because I made a nearly flawless two-sided iron-on transfer on glossy paper (not even bothering with Press ‘n’ Peel Blue), using the paper towel between the iron and the board again to distribute the pressure.
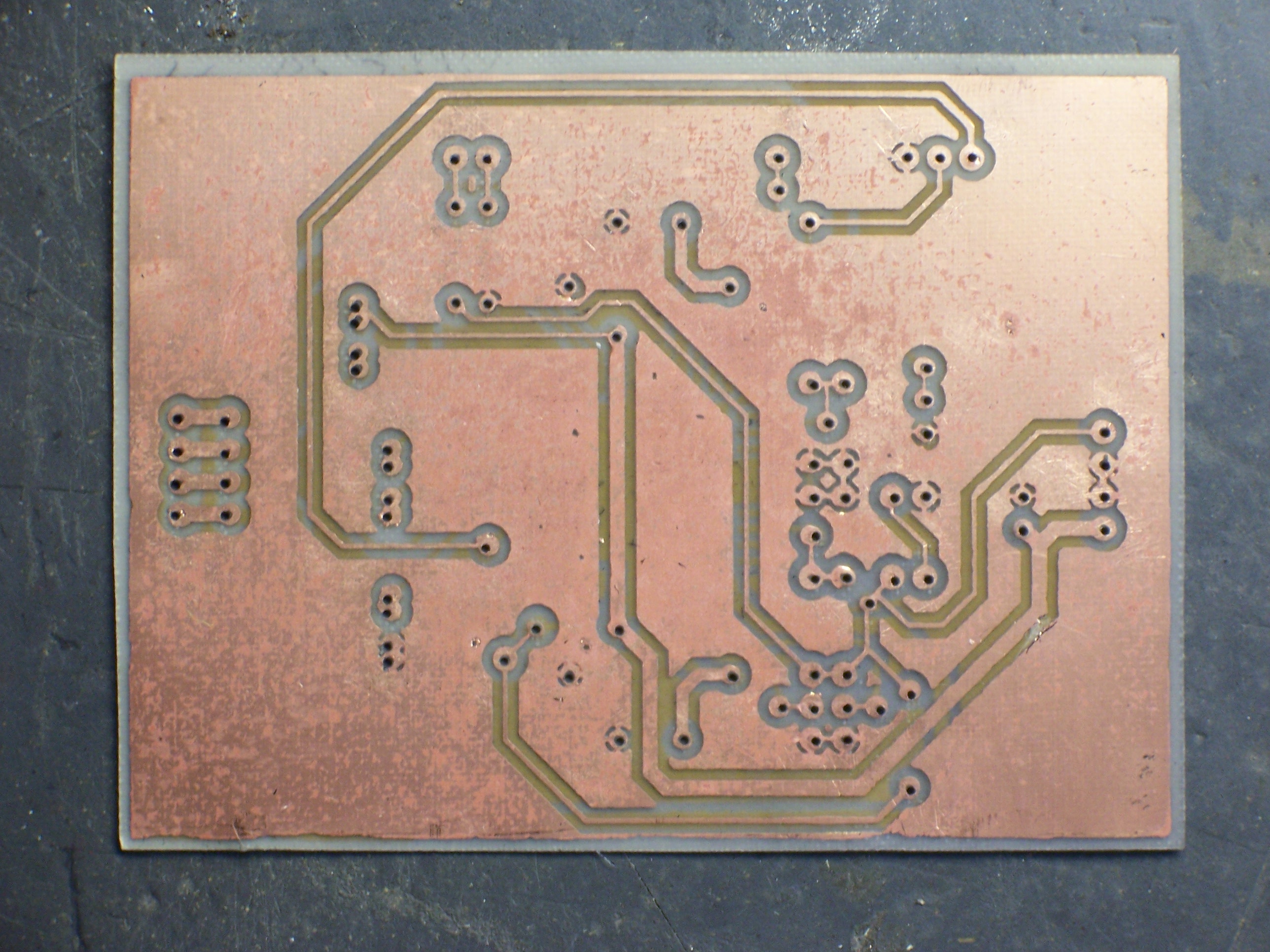
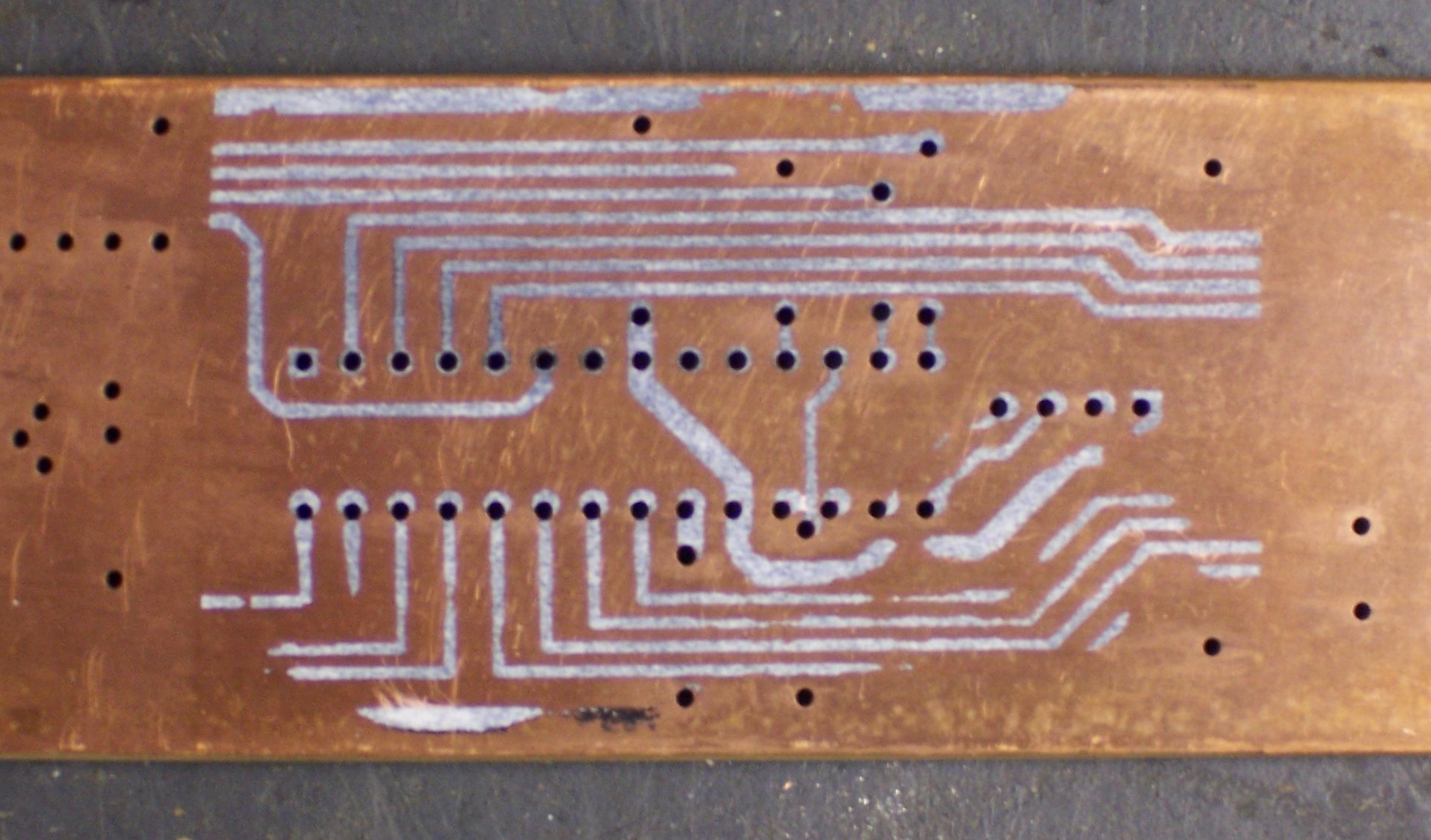
The board came out as nicely as any I’ve done. I used 16 mil traces and 40 mil isolation, so it wasn’t particularly challenging. Still, it etched very cleanly.
I did have a little trouble with pockmarks in some of the large copper areas. They don’t impact the performance — just the appearance. I could perhaps have sanded and polished the board to make it prettier; maybe next time.
On each of the last two PC boards I made, after partially populating the board, I really wished I had tried using the Tinnit. And I’m making more boards now — I know I’ll make at least one more stepper driver board (for the third axis), and probably lots of other things, in the next six months. So it seemed like a good time to try it.
The instructions say to mix the Tinnit powder package with 12 oz of hot water, then add enough water to make a pint. To plate a board, heat the solution to 120-140°F in a pyrex container, then dunk the board for 35-40 minutes, agitating every five. Store the leftover solution in a metal-free container.
Well, my package had two smaller powder packets in it, and it wasn’t clear whether that was two doses or two parts of a single dose. Nor could I find any help online. I took a chance and poured in both packets; and when the second packet caused it to start foaming, it was clear that they weren’t the same and both packets were in fact required.
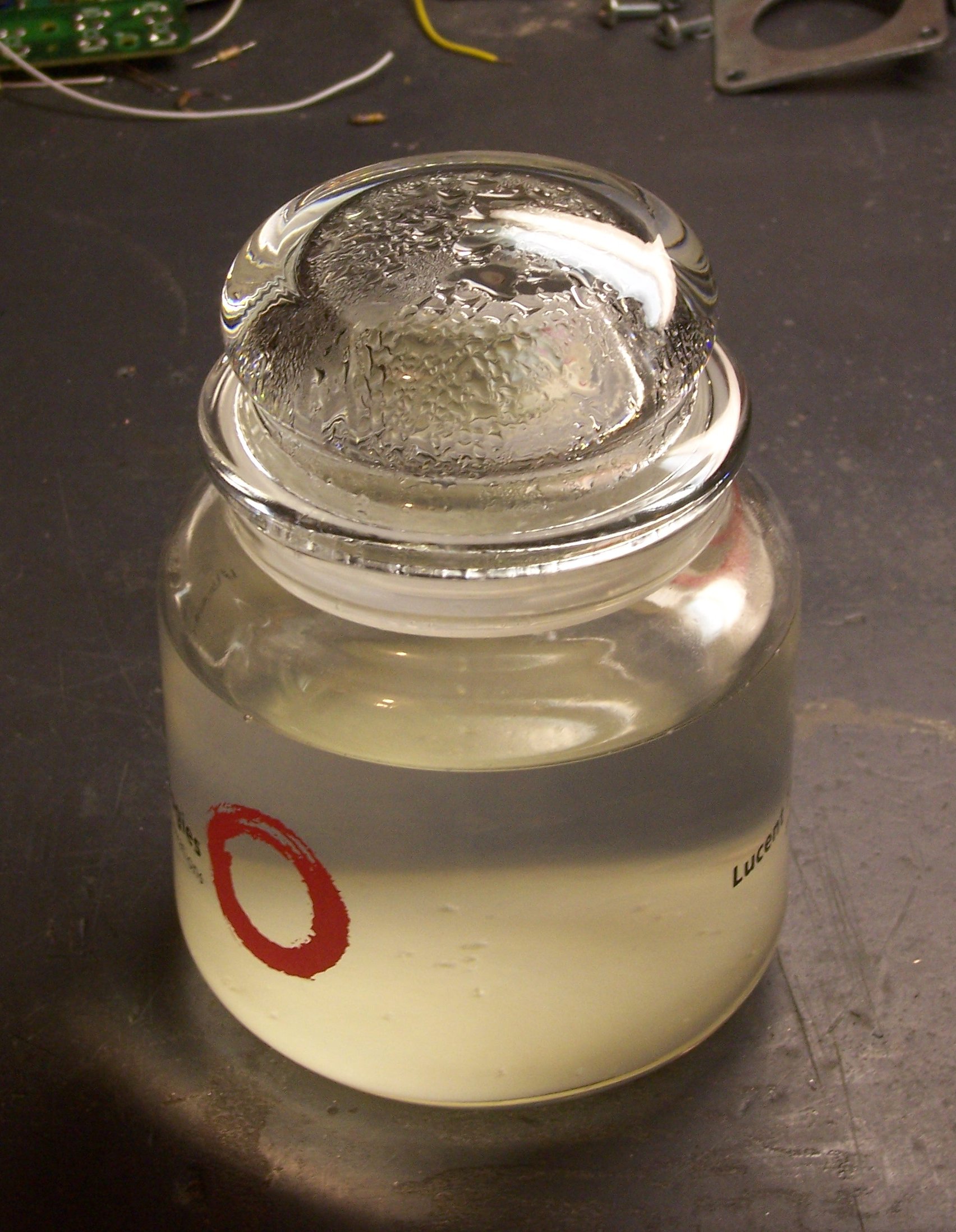
I mixed the solution in a glass candy jar that I got from a vendor about eight years ago. The jar was just big enough to dunk yesterday’s PC board, so I sidestepped a search for an appropriate separate pyrex container for heating the solution. I put the whole jar (minus the lid) onto a stove burner turned to low and checked the temperature and stirred frequently (with a plastic spoon). It’s not obvious from this picture, but there’s a flaky white precipitate at the bottom of the jar that only went fully into solution at about 130°F.
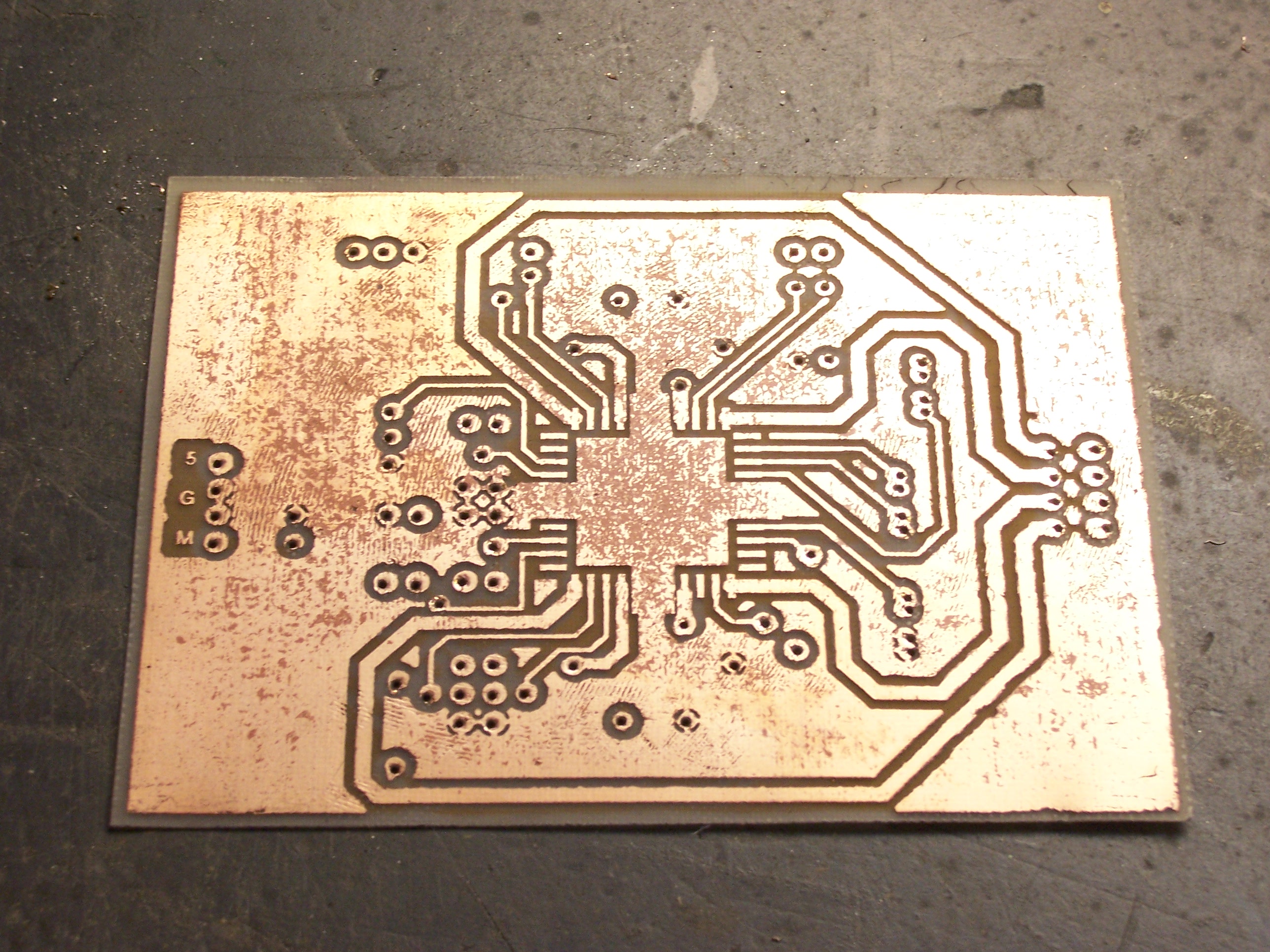
The board started turning silvery almost immediately, and coverage didn’t change visibly from about ten minutes in solution until forty minutes when I took it out. I washed and scrubbed it pretty thoroughly, and it still smells like salts.
The result is very shiny and silvery. The pockmarks are still visible — Tinnit (and electroplating in general) doesn’t cover to enough depth to smooth a rough surface — but the board looks pretty good.
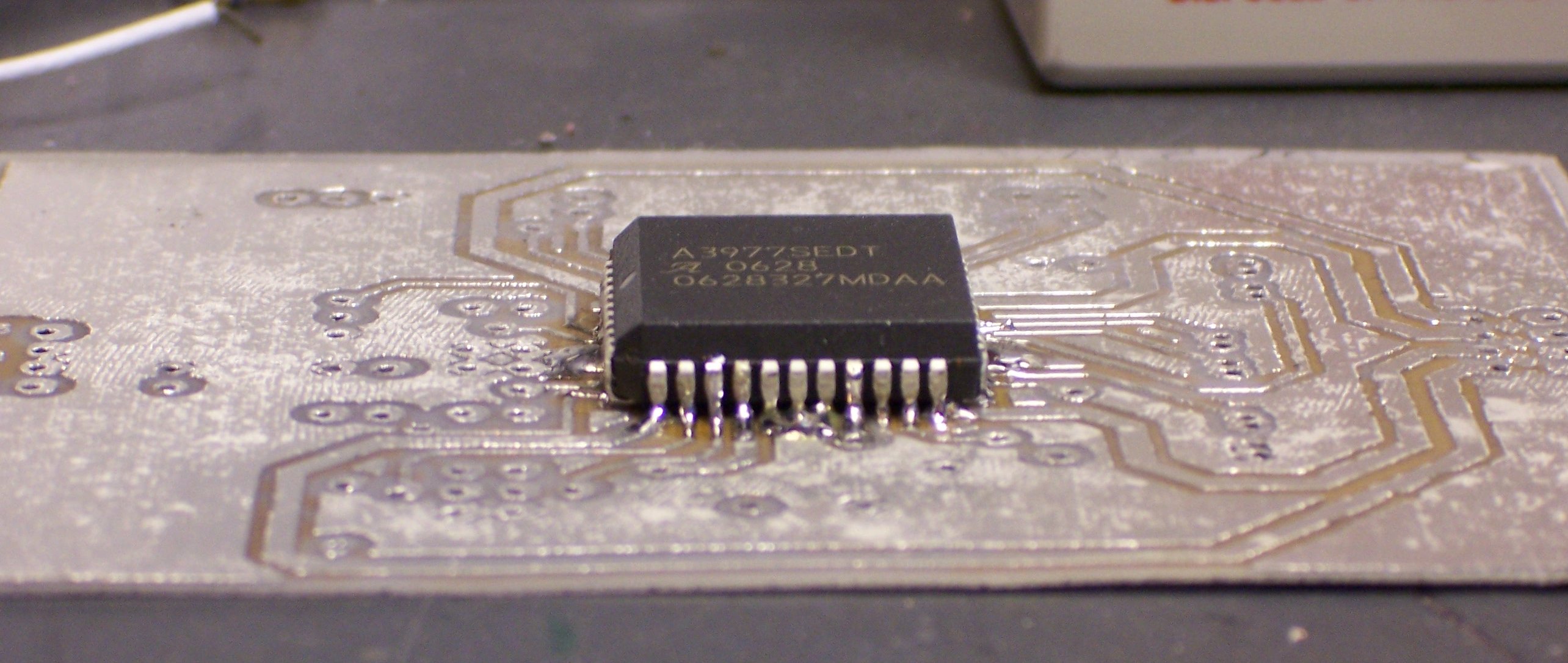
I’m particularly impressed by how much of a difference it makes in soldering. I know it’s easier to solder tinned components, but clean copper takes solder reasonably well. Still, this was amazingly easier to solder. When I built my first A3977 breakout board, I was flowing solder across multiple PLCC leads and cleaning up solder bridges; last night, I was able to solder individual leads with my SMT soldering tip.
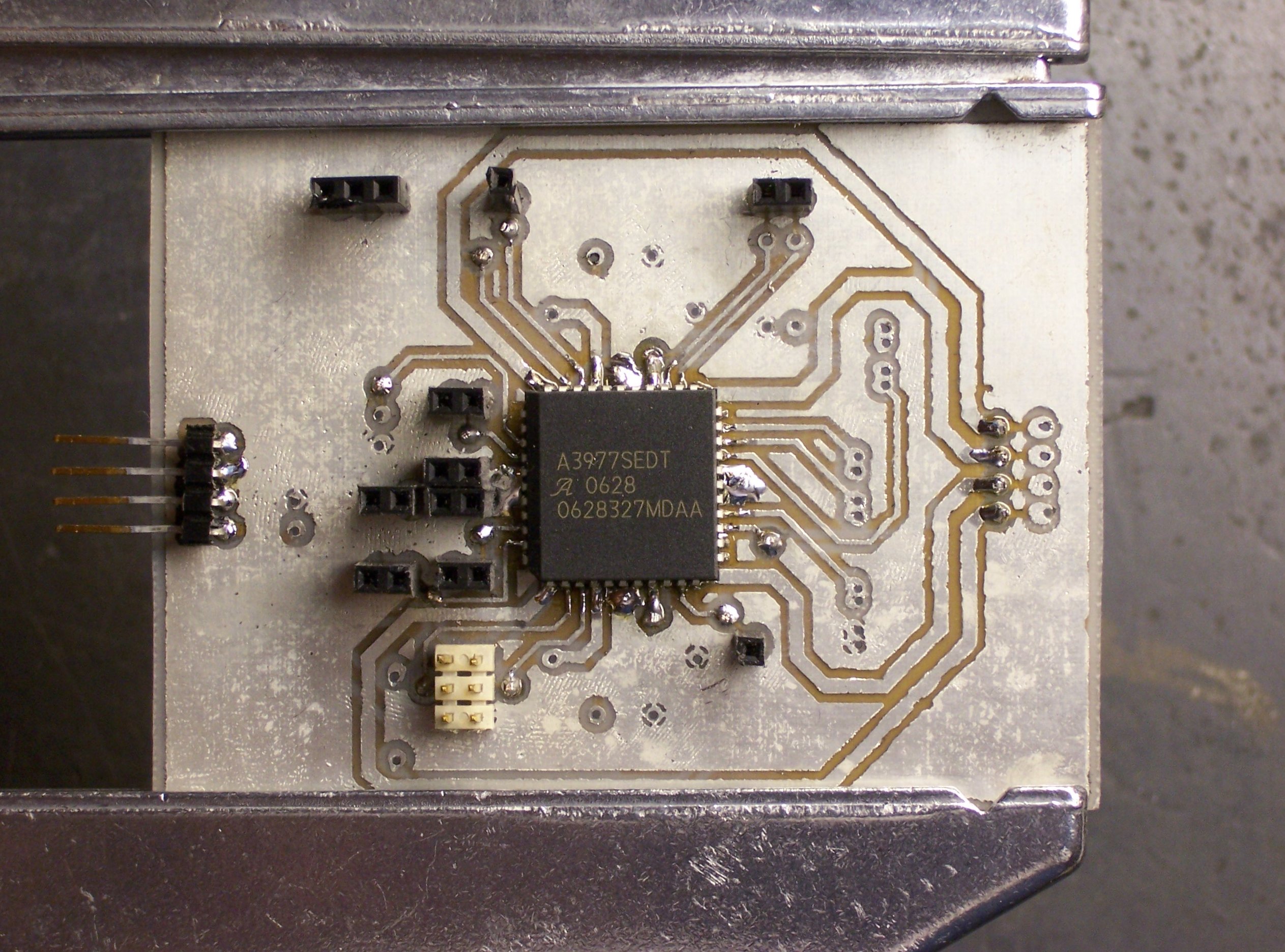
As I was stuffing jumpers and headers, I noticed how monochromatic the board was without the resistors and capacitors installed yet. I finished all the black, silver, and white components and stopped for the evening. Tonight I expect to add the passives and hopefully get the board up and running.
According to the explanation in my previous post, the Allegro A3977 stepper motor driver should be able to run motors faster with a higher load supply voltage. Naturally, I was eager to see this for myself.
Yes, yes it does.
I’d been using my benchtop PC power supply for both 5V logic and 12V load supplies. After swapping the sense resistors this weekend and improving my step rate from 600 steps per second to about 1450, I was really curious how much of an additional improvement I’d get from a higher load supply. The 3977 is rated for a 35V load supply, but some forum posters recommend going no higher than 30V, so I was looking to try out 18-24V.
Joel just dismantled a photocopier with 20V motors; but after looking at the power supply boards, it wasn’t obvious which of the several power supplies was the one providing 20V. Plus they were switching supplies, and I don’t know whether they had integral loads or whether I’d have to provide a minimum load externally . . . bluck.
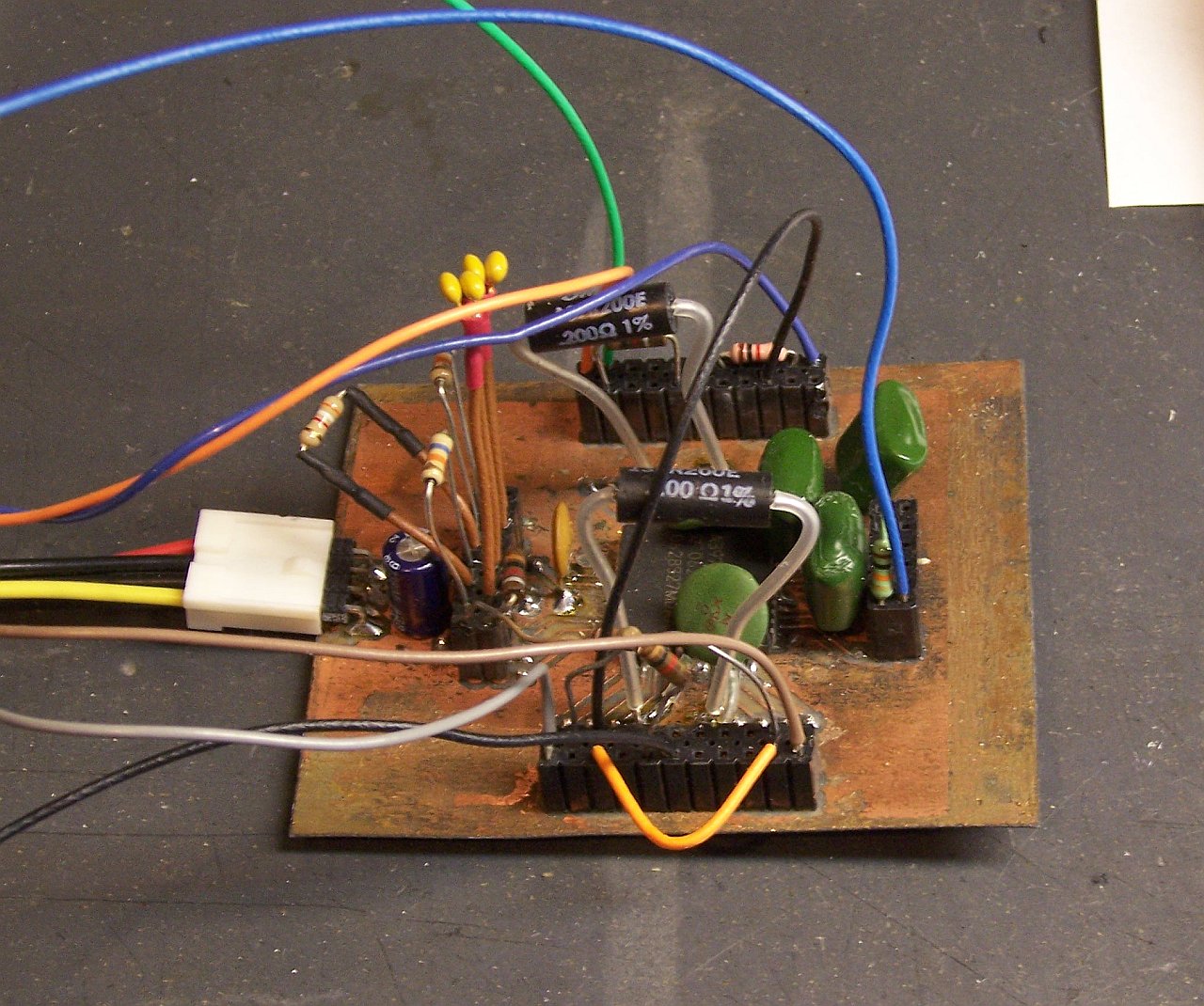
So I hacked together my own ~18V supply.
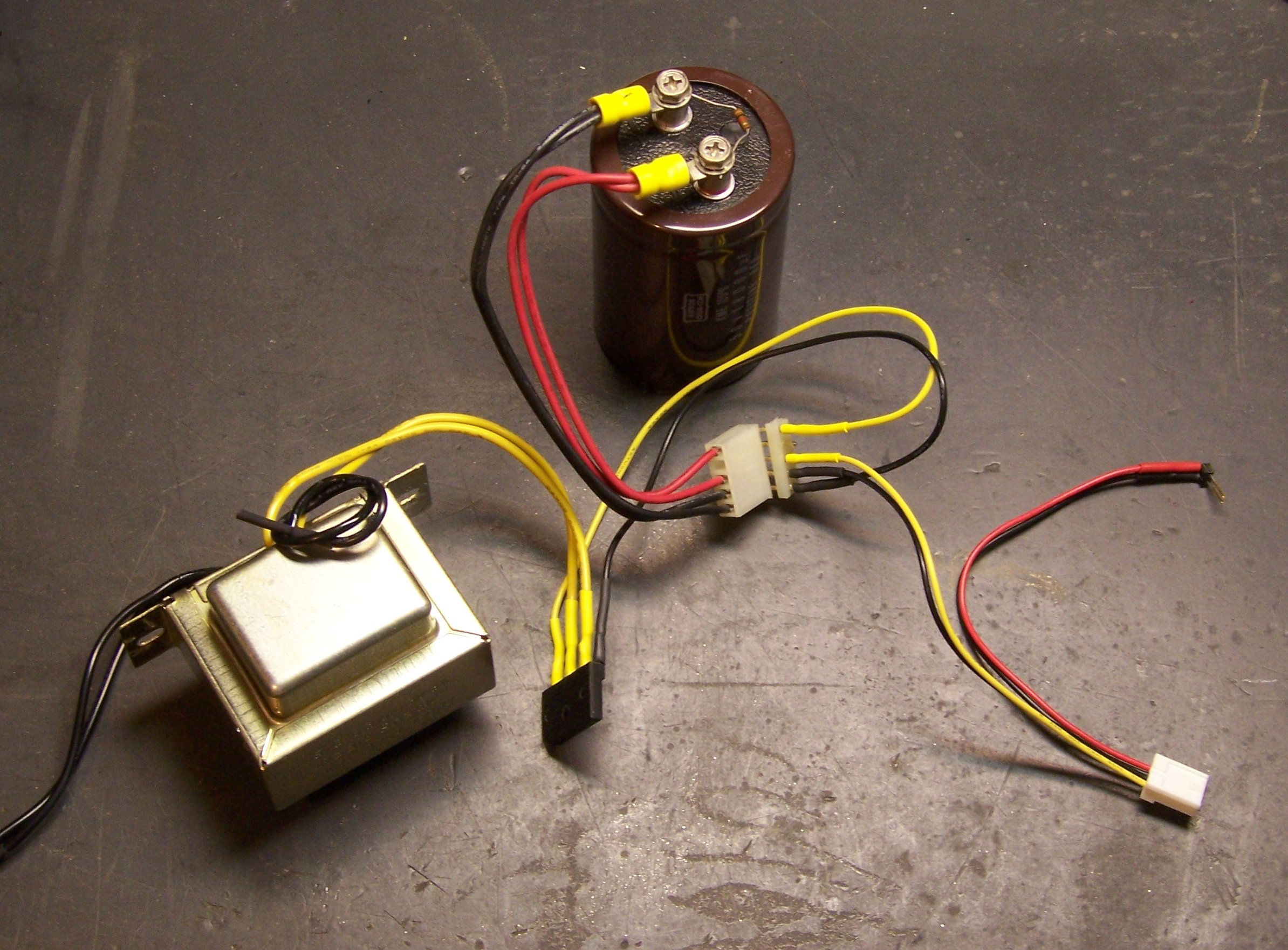
From left to middle to top, that’s a brand new Radio Shack 12.6V 3A transformer, 4A bridge rectifier from a dead PC power supply, and a 18000μF capacitor out of a workhorse Accel printer from a former employer. The line cord is from a broken coffee grinder, the five-pin socket came with the capacitor and the plug from Slim, and the remaining wires and connector are from the PC power supply.
Side note: I’ve seen a few big capacitors in my day, but these impress me. When servicing these printers, I once vaporized a chunk out of my pocketknife’s screwdriver blade when I discharged the big capacitor by accident. I know personally that the last time this capacitor’s printer was powered on was no more recent than 1998. On a lark, after getting the capacitor out of the printer, I put a voltmeter across it, and it still had 3V on it. Ran an LED for a couple of minutes while I was draining it. I screwed a 1KΩ resistor across it to drain it a little faster in my power supply, so I don’t have to worry as much about hurting myself.
I have never kept the formulas for different rectifiers in my head, so I’ll run through the numbers for this one here. The transformer’s secondary (V2) is 12.6VAC RMS, and the peak voltage of a sine wave is RMS * √2, so the secondary peak voltage (VP2) is
VP2 = V2 * √2 = 12.6V * √2 ≈ 17.8VDC
The peak DC output of a bridge rectifier (VP) is the peak secondary voltage minus the two diode drops, so
VP = VP2 – 1.4V = 17.8V – 1.4V = 16.4V
The output of a capacitor input filter is the same as the peak DC value of its input, minus load-dependent ripple, so I should be getting about 16.4VDC out of this setup. Measured about 17.1, so I’m in range. The transformer is rated for 12.6VAC output at 3A, so it’s almost certainly putting out a little higher voltage with such a light load. If I weren’t so lazy, I’d go measure it, but that’s out of the question. ![]()
And there’s no regulator. Linear regulators convert electricity into heat, and I need neither less electricity nor more heat. The A3977 is effectively a switchmode regulator for the motor coils anyway; so by regulating its input load supply voltage too carefully, I’d just be duplicating effort. Especially for a test. Note that I’m still running the logic supply voltage from the well-regulated 5.0V output of my PC power supply — the red and black wires in the photo above are picking that up and adding it into the four-pin supply jack.
With my scope across the capacitor terminals, I estimated .2V peak-to-peak ripple when running one motor at full speed. That’s pretty lousy ripple for most digital or analog circuits, but by all appearances just fine for this application. Especially, as I intend to keep pointing out, for a test. ![]()
The motor is running noticeably faster before losing steps — up from 1450 steps per second to about 2300 steps per second. That’s an improvement from 2.8 seconds per inch of linear travel to 1.7 seconds per inch — a considerable difference for something as simple as changing the load supply voltage.
I want more, of course. I still want to see what happens at 24V and at 30V, so I bought a bargain 24V power supply on eBay today. When it gets here, I’ll give it a shot.
It’s worth noting that as far as I can tell, I don’t need to change anything in the A3977 circuit to adapt to the new load supply voltage. The sense resistors determine the maximum current that should flow through the motors, and the whole job of the 3977 is to keep that the same regardless of supply voltage. And I provide VREF from a divider on the logic supply voltage, so that’s also independent of load supply. Slick.
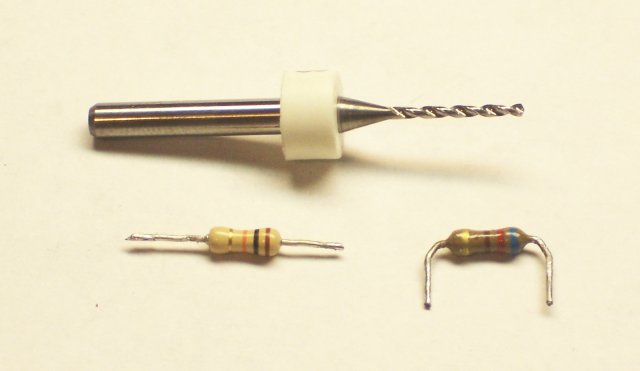
The stepper motors I’m using to build my CNC machine are rated for 2.5A. Now, when they’re holding one position, it’s easy to deliver 2.5A of current. But when the motors are rotating, their coils are being energized one at a time in sequence.
The coils are inductive, and inductors resist changes to current. So when a coil is first energized, it takes a moment for the current to build up to capacity. As a result, with a simple stepper driver, the faster you turn the motor, the less of the time each coil gets full current, and the weaker the motor gets.
The Allegro Microsystems A3977 stepper driver chip I’m using to control my stepper motors overcomes this by running at a (much) higher supply voltage than needed to deliver 2.5A, and by using sense resistors in series with the motor coils. When it’s time to energize a coil, the A3977 delivers the full supply voltage and watches the sense resistor. When the desired amount of current is flowing through the resistor (hence the motor coil), the A3977 shuts off the voltage (briefly), then ramps it up again. The result is the delivery of the desired current on average, but with a much more rapid start due to the higher supply voltage.
Buried within Allegro’s A3977 FAQ is the recommendation that the sense resistors should be non-inductive. Since the values required are the sub-ohm range, commonly-available resistors are in big sand packages — and as noted by Jeff Mann in a comment posted about my control board, are internally wirewound and inductive.
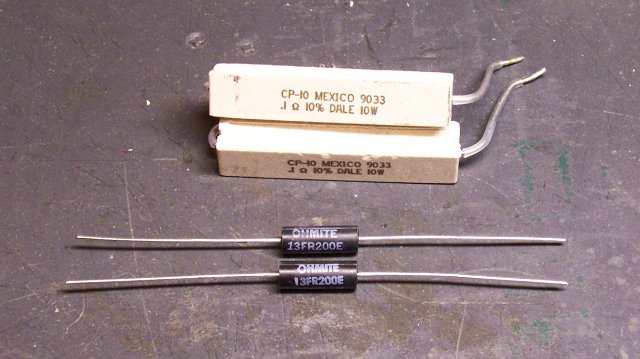
I had already bought Ohmite non-inductive sense resistors from DigiKey, which are also much smaller and more manageable than the big sand resistors. (The cross-section of the sand resistors is about 1/2″ square.) I hadn’t worked on the stepper driver in quite a while, though, and I hadn’t put in the noninductive resistors yet.
Did that Saturday. The difference in performance is amazing.
The last time I did a speed test of my stepper motor controller, I was able to get about 500-600 steps per second before the motor started losing steps and stopped turning. Additionally, it growled and twitched when it was idle, and grunted and jerked at low speeds, smoothing out only at higher speeds.
With the non-inductive resistors installed, all the growling and twitching went away. (Someone should look at non-inductive resistors for bulldogs, but I digress.) I’m able to ramp the motor up smoothly from a stop to full speed.
And full speed has increased from about 600 steps per second to over 1450 steps per second, just from installing non-inductive sense resistors. With my 200 step/revolution motors and 20 tpi all-thread, that’s an improvement from about seven seconds per inch of linear travel to about three seconds per inch.
That’s still running on 12V out of my spare PC power supply, and I’m trying to rustle up a 24V supply to test with, which should increase the speed further. That’s also without tweaking the A3977′s component values — I hear there are some tricks to play there, too.
Executive summary:
Inductive sense resistors with the A3977 make the motor growl and jerk when idle and at low speeds, and limit maximum speed. Non-inductive sense resistors with the A3977 make the motor smooth and quiet at all operational speeds, and dramatically increase maximum speed.
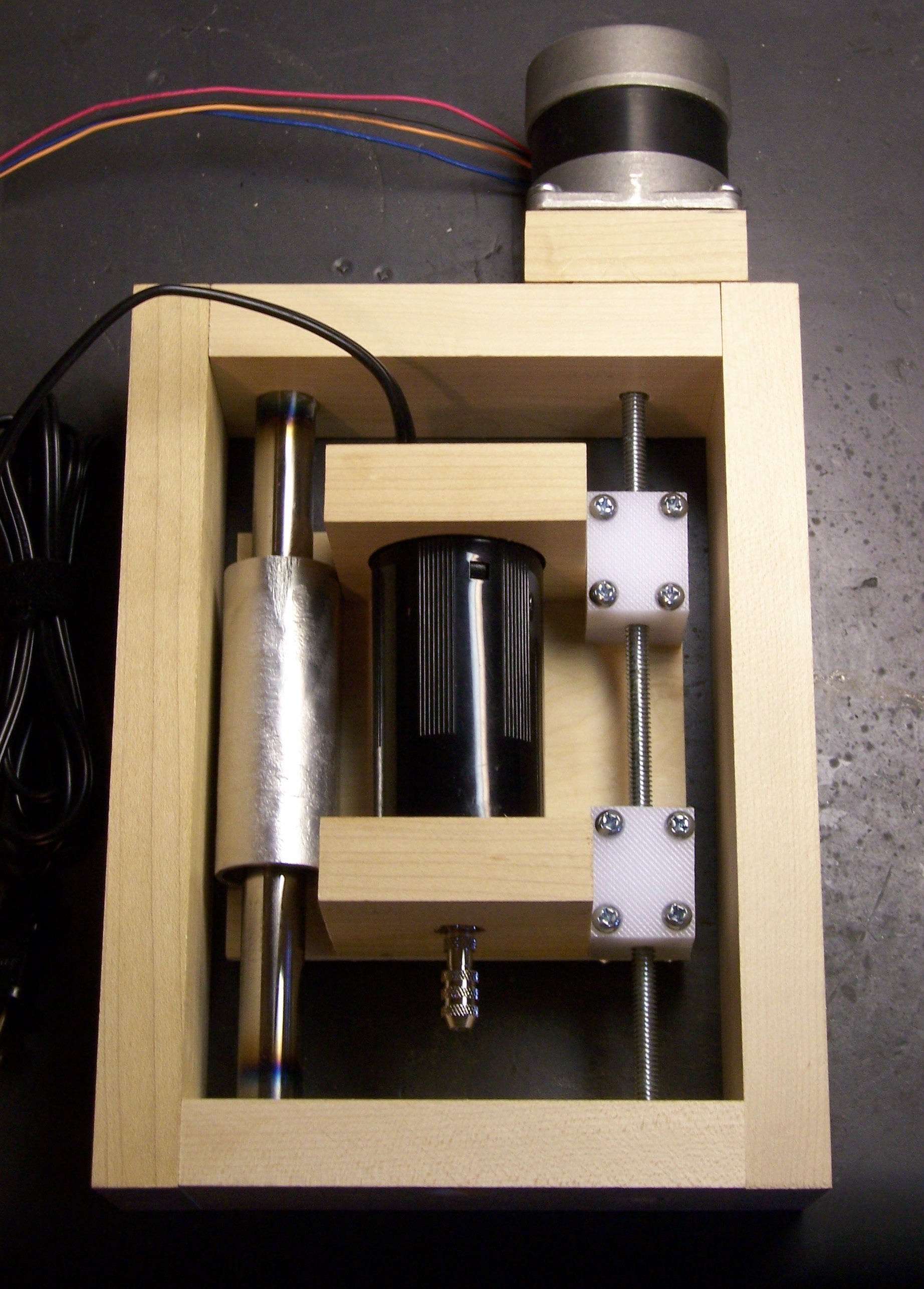
I have the drill sled mounted in the frame, the motor properly mounted, and the joystick controlling it at variable speed. Next step is building the Y axis around the Z frame.
Many thanks to Jeff Mann for his original comment, which drew my attention back to replacing the sense resistors, and for our followup conversation, which helped me understand and think through how the PWM driver makes the motors work better at higher voltage without going over the rated current.
When the CNC machine is finished, it will of course be controlled by a computer. But during development, it’ll be handy to test it with other controls, like joysticks. I had in mind to use analog joysticks, so I could control motor speed as well as direction.
Unfortunately, I couldn’t find the analog joystick element that I bought from All Electronics. (That this happened something like nineteen years ago may have a little to do with why I can’t find it right now.) Fortunately, a poll of my friends for an analog joystick I could borrow yielded this game controller that Jeremy had already brought me in a batch of electronics junk:

In his own words:
Didn’t like it because it was crappy. The retractable cord (while an OK idea) was too short and stiff. Its real downfall was that the buttons were sticky. They wouldn’t pop back up immediately when pressed so rapid tapping was impossible. More frustrating than useful.
So, perfect for me to butcher for my own purposes.
My first thought was to extract the analog joystick elements, so I opened the case and dug in.

Here you can see all the guts that make it work. The upper half of the picture is the bottom side of the case, with the retractable USB cable recessed under the PCB, and wipers on the PCB to make contact as it spins.
In the handles near the bottom of the picture are small motors with eccentric weights for “force feedback,” and directly above them at the center of the picture are the pushbuttons on the forward edge. The tan PCB has contacts for the pushbuttons, LEDs, and pseudo-joysticks on the top face; and the green PCB is the brains of the outfit.
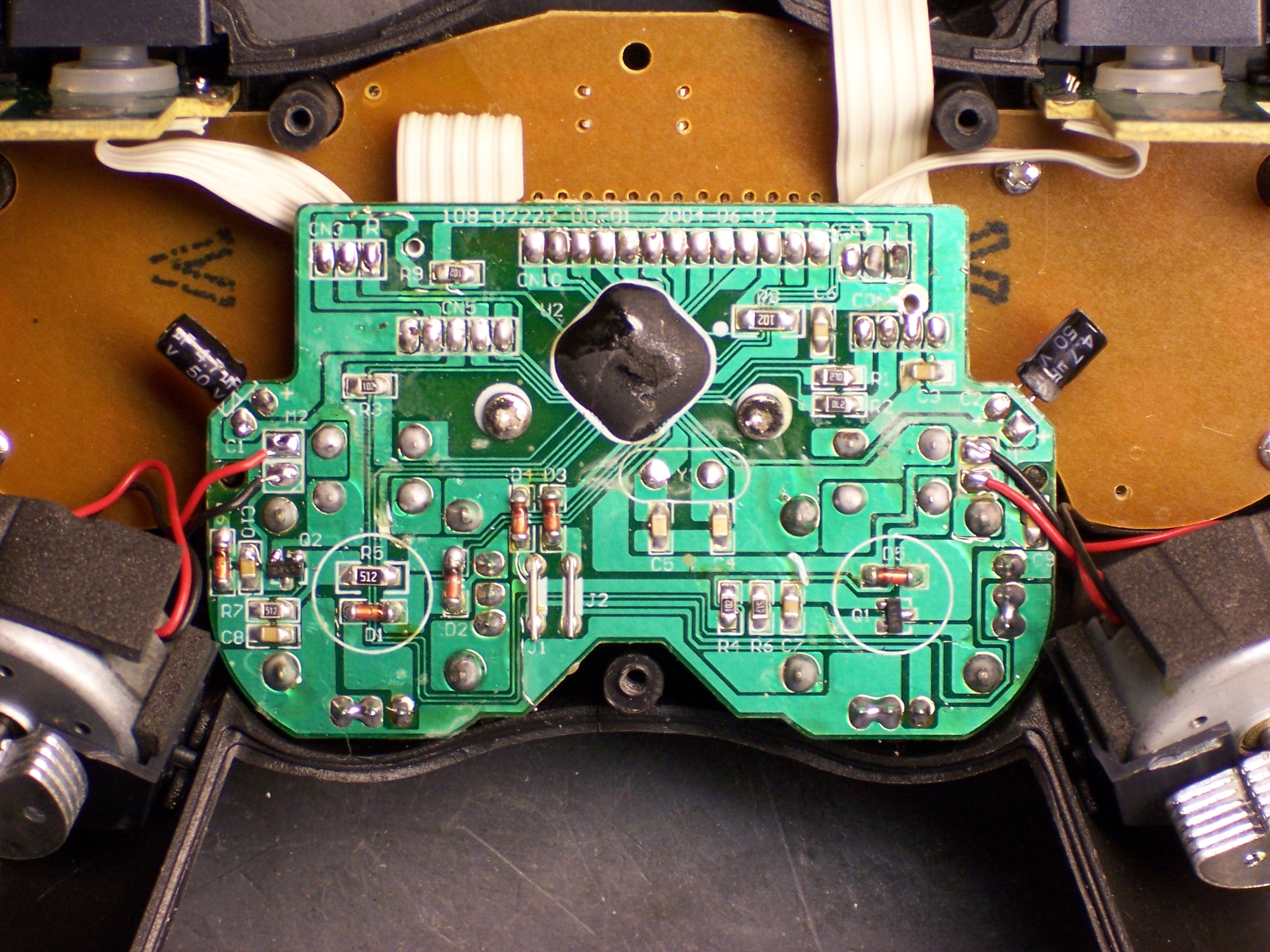
The main board holds the analog joysticks (the solder pads surrounding the silk-screened circles in the lower left and right) and the USB interface (in the black blob).
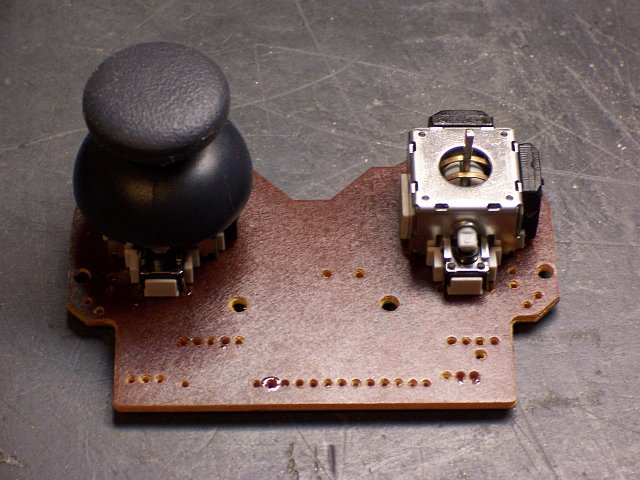
Flipping the main board makes it easy to see how joysticks work. Each is a clever cage with a gimbal mechanism for the stick, connecting to two potentiometers (visible above and to the right of the right stick). These joysticks also have pushbutton action (like clicking the scrolly-wheel on a mouse), so there’s a stick coming out the lower side to a switch housing.
I had actually completely desoldered one of the joysticks when I stopped to think about how I was going to mount them — loose, to a board, what? How about . . . in a game controller case. Duh.
So I soldered the joystick back in and started to look at the circuit. The USB interface was useless to me since I wanted direct access to the analog controls, but I could still use the board as a carrier for the components.
The controller had the potentiometers wired as variable resistors (the wiper tied to one leg, probably for the blob to measure resistance with an RC timer), but I wanted potentiometers so I could measure voltage with an A/D converter on my microcontroller. So the first order of business was cutting traces.
I used a knife to cut through the traces tying the potentiometer wipers to the legs, and the continuity meter to makes sure I’d cut thoroughly enough. Then I identified which direction I wanted to be 0V and which 5V (moving the joystick to the upper right should deliver 5V on each axis), labelled potentiometer terminals with + and -, and started jumpering together pads that hadn’t previously been connected, to distribute power and ground to all the potentiometers.
And that’s how far I got in May, when I last worked on it. I picked it up again this weekend and finished the job.
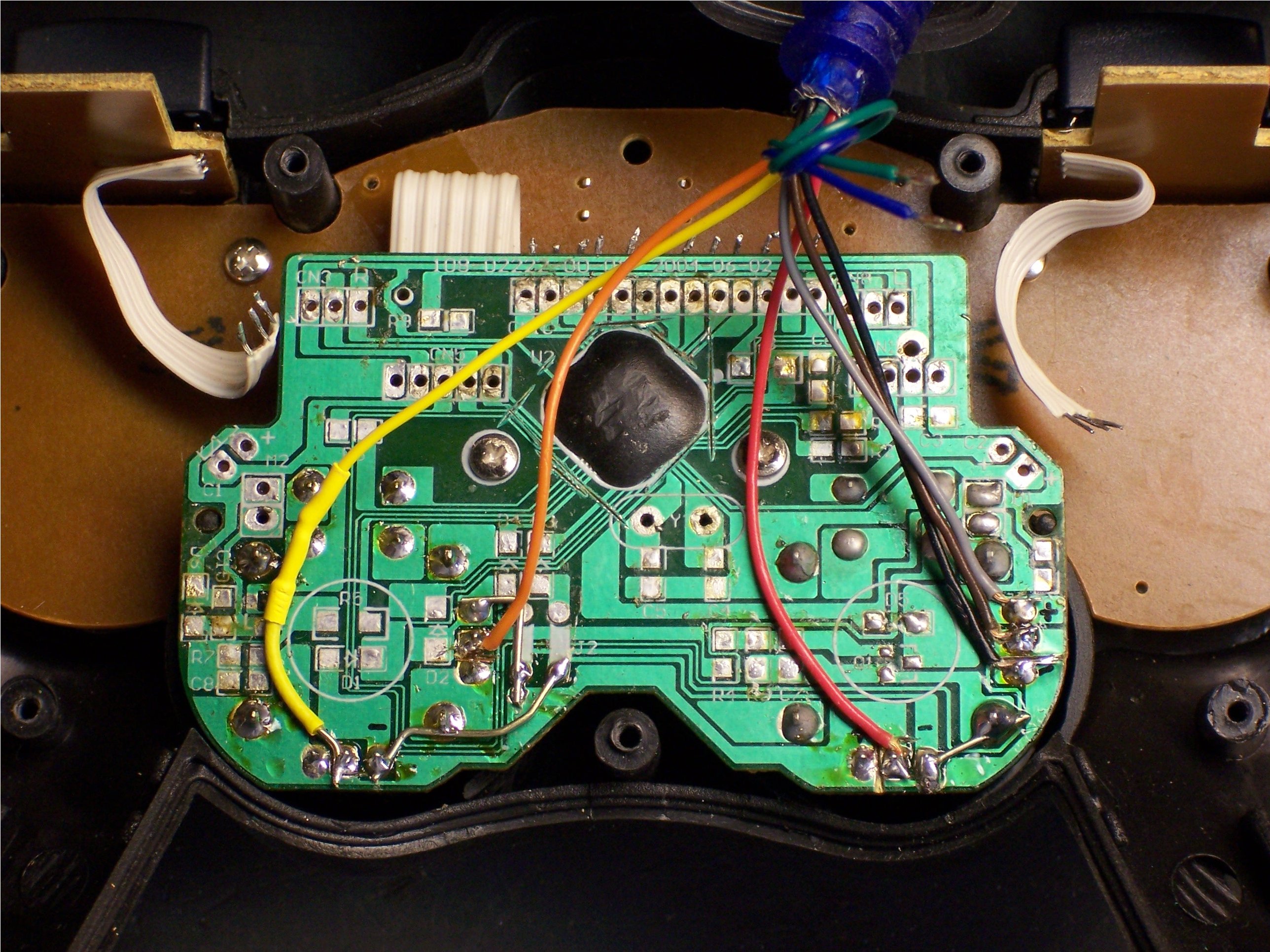
I severed all the connections around the processor blob, since I didn’t need it and didn’t want it getting confused by the new arrangements. And I soldered on wires from a supple new cable Joel gave me (salvaged from who-knows-what). I provide 5V and ground on the grey and black wires, connected joysticks on brown-red-orange-yellow, and have blue and green left over for pushbuttons when I figure out which ones I want to use.
On the loose end, I soldered a header pin to each wire, to fit nicely into prototyping sockets, and heatshrunk each solder joint. I also heatshrunk logical pairs of wires together, to make it easy to remember which wires go together to a potentiometer. You can see that end in my previous post on the Arduino.
I made one mistake, which I had to go back in and correct: I wasn’t thinking straight about which potentiometer was the X axis and which was the Y. The one across the bottom, of course, is the X axis, and the one on the side the Y — but that’s not how I wired it. I swapped the brown and red and orange and yellow wires from what’s shown in the shot above.
And it works great! I have it reassembled and the right joystick controlling the prototype Z axis of my milling machine . . . which I’ll talk about next.
I’m back to working on my CNC machine and wanted to hook some joysticks up to a microcontroller to run the motors back and forth during development, before I have the whole thing running under computer control. I realized that the PIC18F232 (LogoChip) has only two PWM outputs and I have three motors to control, so the LogoChip isn’t going to be ideal for this.
The Atmel has scads of PWM outputs, so I finally busted out the Arduino I bought a year ago from SparkFun Electronics. The Arduino is, to snip from their own description, an open-source prototyping platform based on a couple of Atmel microcontrollers.
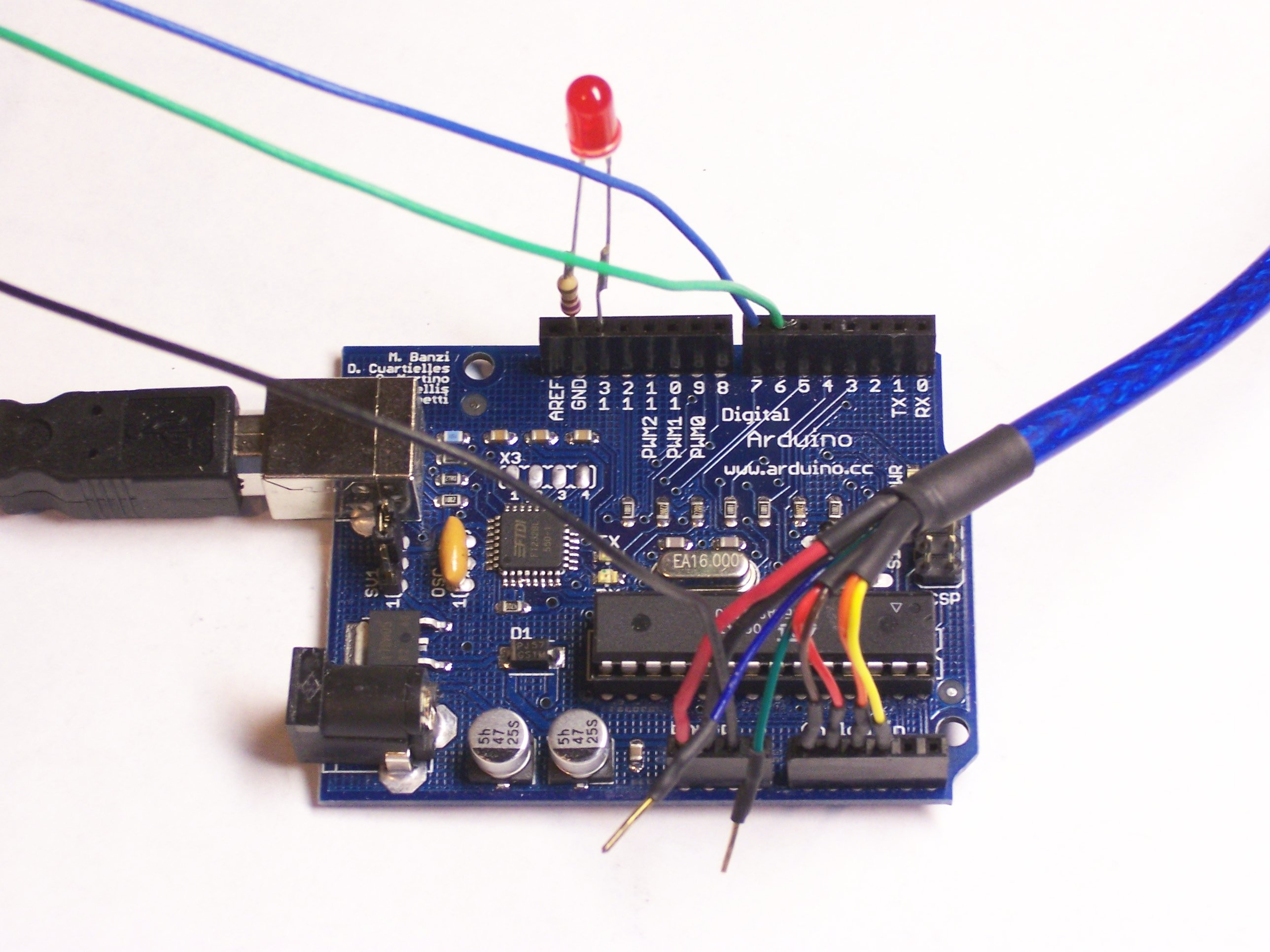
The Arduino folks really shined up their Macintosh dev system install procedures since the last time I looked — I downloaded a zip file, double-clicked a USB driver installer and rebooted, double-clicked the IDE icon, and I was in.
I played with the Arduino Friday night. It’s really, REALLY nice to be programming in C again. I had come to the conclusion earlier from looking at the language that it was C with some microcontroller-specific libraries provided, and that’s exactly what it is. The documentation even mentions that it’s using avr-gcc underneath.
Here are my first impressions:
So overall, it’s super easy and fun for geeks with programming experience. Proooobably not a good introduction to microcontrollers for visual arts students, though.
The project I’ve been working on lately is a power sequencer for my SAE A502 and A202 amplifiers. I bought my first A502 with summer job money when I was in college, and recently I’ve bought a few more on eBay. They’re big and beefy and I love ‘em.
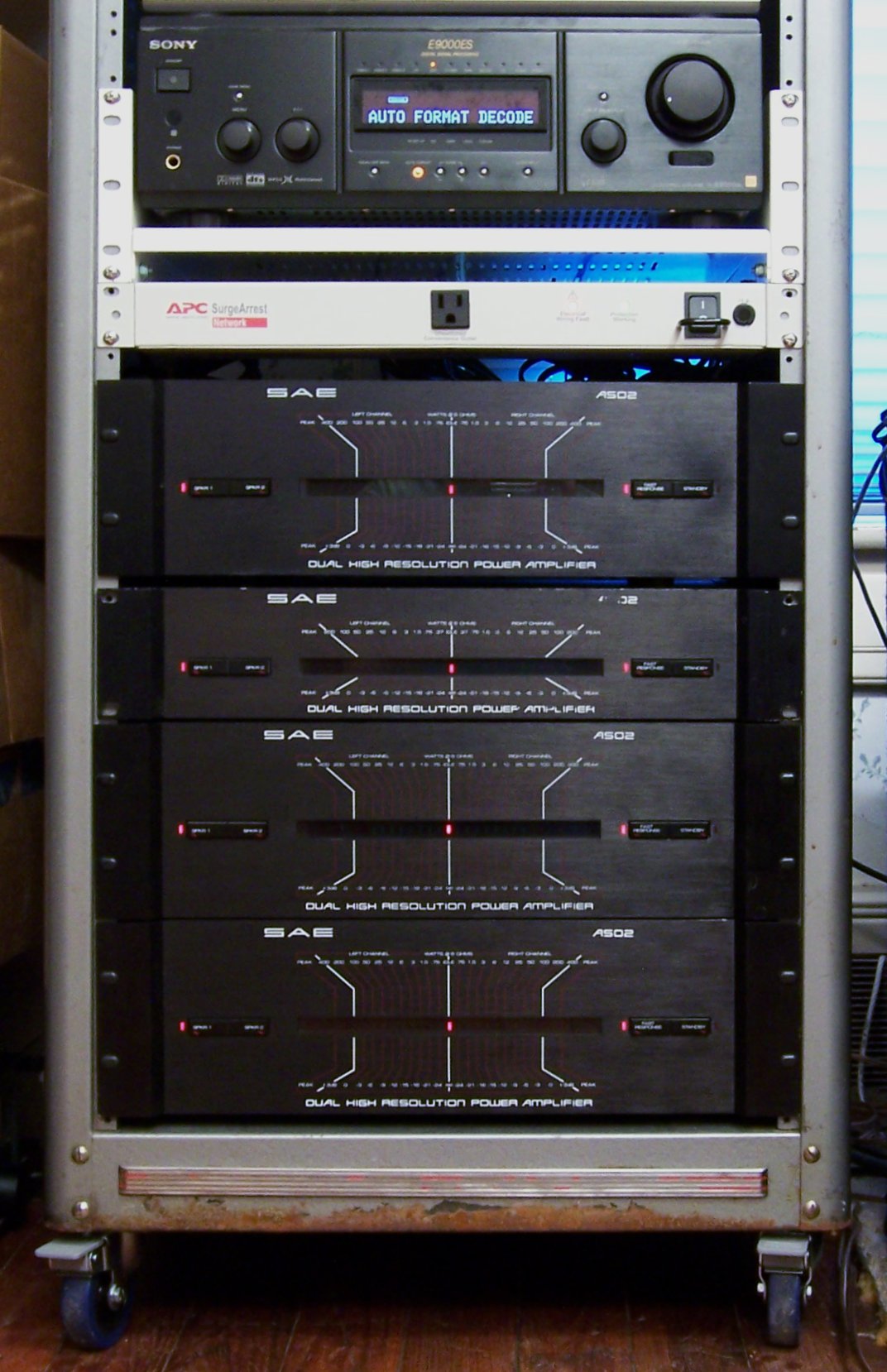
Their only drawback is that they have to be switched on and off manually — they’re not tied to my preamp. This is particularly annoying to my wife who hates all things electronic — she just wants to watch TV or a movie, and she has to fiddle with all these buttons to get the sound to come on.
Well, not any more.
Many of the SAE amplifiers, particularly including the “02″ series, have standby inputs. The SAE preamplifier puts out a signal telling the amplifiers when to turn on and off, and the whole stack is controlled by the preamp.

Which is great if you have an SAE preamp and you just want to listen to stereo audio — but SAE went out of business long before the advent of home theater surround sound, much less 5.1 surround. If you want surround, you’re not using an SAE preamp; and if you’re not using an SAE preamp, you’re turning your amplifiers on and off by hand.
I’ve long dreamed of building a box to do that for me, and now I’ve done it.
The first step was determining how the standby signalling is done. The owner’s manual isn’t much help; it doesn’t list the details of the protocol, but only describes (in rather roundabout language) that you need to manually turn the amp on and let the preamp turn it off.
So I opened an amplifier and looked at its standby board. The circuitry is very simple, and I’ve since confirmed my schematic against the amplifier’s official schematic.
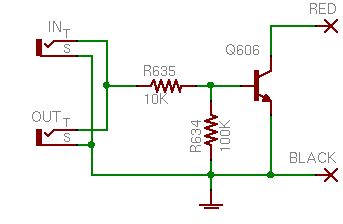
The “input” and “output” jacks are identical and tied directly together, with the tips feeding the base of an NPN transistor. Put a small amount of current through the tip and the transistor will shunt the red wire’s voltage to ground.
Inside the amp, the red wire connects to the base of a Darlington pair that drives the main power relay. Steal its base current and the relay can’t switch the main power on; hence the standby is an override to keep the amp off, as the manual described.
Knowing that, it’s very simple to build a device to control the amplifiers.
The question that remains is how to know when it’s time to turn on. In my case, since I have an A/V preamp, I thought the preamp put out a video signal any time it was on (even if it was just a bluescreen when no inputs are active). It turns out I was wrong, but this was still a productive train of thought.
I used an LM1881 video sync separator chip to watch a video connection. The chip ends up generating sync signals if none are present, so I couldn’t use its sync outputs to detect the presence of video; but it has a logic-level odd/even frame output that oscillates at 30Hz whenever an interlaced video signal is being received. Repeated rising (or falling) edges == video present.
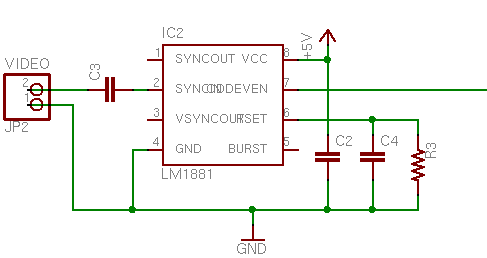
I had already built and tested the circuit before I discovered that my preamp most certainly does not output video when it’s on, unless it actually has a video input on as well. That was very disappointing, since I don’t want the system dependent on a third device that supplies video — it should work whether I’m watching a movie, listening to a CD, or listening to 8-track.
Skulking around for alternatives, the best I could come up with was the switched outlet on the back of my preamp. I bought a slim 5V wall wart to plug into the back of the preamp and added another detection circuit to rectify and regulate an arbitrary low-voltage input.
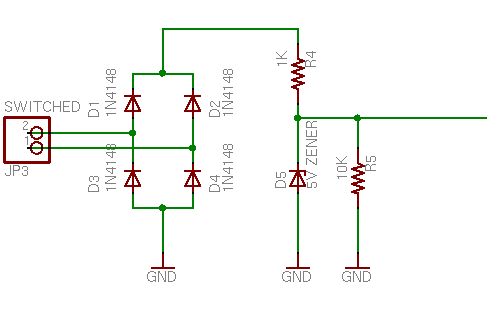
The preamp powers up, the switched recep comes on, 5V feeds into the bridge rectifier, and a logic high feeds out. The input would do just as well detecting a low-voltage AC wall wart . . . if I had remembered to put a capacitor between the diode bridge and R4. Duly noted for the next version.
Cort was saying that I should have built the whole circuit out of discrete TTL logic, and I could indeed have done so, for a little retro charm. However, I wanted additional control that would have raised my chip count too high, so I built the control with a PIC.
When the preamp comes on, the sequencer turns on all four amps, one at a time, to spread out the inrush current. (Could have used a clock and a shift register.) But all four amps are only needed when watching movies — listening to music requires only the front and sub channels, not the center and rear. I wanted manual override pushbuttons so I could turn off the unused amps. (Could have used S-R latches.)
Additionally, when Cort and I were discussing what should happen to manual selections when the preamp eventually turns off, he suggested having a fully manual mode that ignores the signal detector inputs and heeds only the front-panel pushbuttons. (Could have . . . naahhhhh.)
Ultimately, I ended up using every available I/O pin on my PIC18F232:
I wrote the code in LogoChip Logo, with subroutines to service the input modules and a state machine to control the different modes. All of the timing is done in software, including the delay between turning on consecutive amps, and a loss-of-video countdown timer to keep short glitches from bouncing the amps.
The video detector wasn’t a waste; I plugged a spare output of my DVD player into it, so the amps come on when the DVD player is turned on or the preamp is turned on, whichever comes first.
Here’s a video of me turning on the DVD player and the sequencer (just above the amp stack) turning on the amps, then turning off the DVD player and the sequencer turns off the amps after a delay. If you have audio turned on, you can hear the amps’ relays clicking in sync with the sequencer LEDs, then later clicks as the delayed speaker relays engage.
This is really slow to load; I’m working on migrating this to YouTube.
These are too slow to load and are causing problems with my browser. You’re welcome to paste in the URL and try them if you like.
embed src=”http://www2.neufeld.newton.ks.us/images/electronics/2007/08/06/100_3046.mov” controller=”true” width=”480″ height=”656″ kioskmode=”false” autoplay=”false” pluginspage=”http://www.apple.com/quicktime/download/”>
There’s one little snag — the standby circuit on my top amplifier isn’t working, so I’m still turning it on and off manually. I just bought an SAE preamp on eBay and should receive it within a week or so, at which point I’ll hook it up and see whether it has magic juju that my sequencer doesn’t, or whether I need to troubleshoot my amp.
Here’s a nearly identical video of me turning on the preamp and the sequencer turning on the amps.
embed src=”http://www2.neufeld.newton.ks.us/images/electronics/2007/08/06/100_3047.mov” controller=”true” width=”480″ height=”656″ kioskmode=”false” autoplay=”false” pluginspage=”http://www.apple.com/quicktime/download/”>
Well, not yet, but I’m interested in pursuing it. There’s a pretty active community of SAE equipment owners, and I have to believe there’d be other folks in the same position, using SAE amps with non-SAE preamps. After I work through a few issues, I’d like to offer the power sequencer in both kit and appliance form and see if I can sell a few.
I want to split the main circuit board into a front-panel board and a control board, to make it easier for other folks to adapt the LED and button spacing to fit enclosures of their own choice. That also solves the problem with the RJ-45 jack, as it could then be on the component side of the control daughterboard. And I made some mistakes in the physical size and mounting of the board that I’d like to correct as well.
Once I touch up the circuit and board designs and clean up my code, I want to release the whole schmear under a Creative Commons license, probably Attribution Share Alike. Lady Ada’s Creative-Commons-licensed kits are pretty inspiring to me, and I’d like to think there’s a small but healthy market for kits and appliances that don’t rely on keeping the design closed and secret.
Wish me luck!
After drilling my board (and finally getting the right holes in the right order), I took it back home to etch. I wanted to print an etch-resist mask on my laser printer and iron it onto the board, and I wanted to do it using plain, glossy paper.
I had originally laid out the board using default sizes of 28 mil holes and 50 mil pads. Since I broke too many drill bits and ended up drilling with a 39 mil bit, that would have left me only 5.5 mils of copper surrounding each hole. That’s not nearly enough to solder to, much less enough to consistently align with an iron-on transfer. I went back into FreePCB and increased all the pad sizes to 70 mil, to give about 15 mil of copper around each hole.
Lesson: Keep a good supply of small drill bits.
Lesson: Don’t bump up to larger drill bits if you run out of small ones. Wait for more of the right size.
Lesson: Use larger pads than default when laying out a board for iron-on transfer.
Once I had increased the pad size, I exported the bottom copper layer as an image file. (FreePCB doesn’t seem to have a working Print function.) Because the bottom layer is drawn from the perspective of the top of the board, one would normally mirror it to view how it would look from the bottom. But the iron-on process reverses the image, so I needed to print it unmirrored.
Lesson: Export/print the bottom copper layer unmirrored when making iron-on transfers.
Because the 16.8″ length of my PCB was greater than the size of paper my printer accepts, and because the printer doesn’t seem to print at exactly accurate size, I used the GIMP to chop the image into three pieces, to iron on in sections. I split the image in areas with no holes and all horizontal traces so it’d be easy to line up, and I left about 1/4″ of overlap at each joint so I’d double up toner on the board rather than taking any chance of having a gap.
I ironed the two outer sections onto the board using our household iron set at 350°F and no steam, then soaked the board for half an hour to soften the paper and carefully peeled it off.
A lot of the traces came off with the paper. It didn’t feel like I had peeled the traces off the PCB — it felt like they had never adhered in the first place. Reinforcing that suspicion was how much effort it took to clean the traces off the board and start over — the ones still on the board were well stuck. I ended up using acetone to clean them off the board.
I printed another copy and ironed it on, using the maximum temperature on the iron and the Giles Corey method (more weight). This time I soaked the board for over an hour. Once again, large sections of traces peeled away.
I have a few sheets of Press ‘n’ Peel Blue that Joel bought and encouraged me to test drive, and I’d had reasonably good luck the previous time I tried them, so I got them out. To avoid wasting an entire sheet of Blue, I printed the design onto a carrier sheet of plain paper, then cut appropriate-sized sections of Blue and masking-taped them to the paper over the printed areas and printed again.
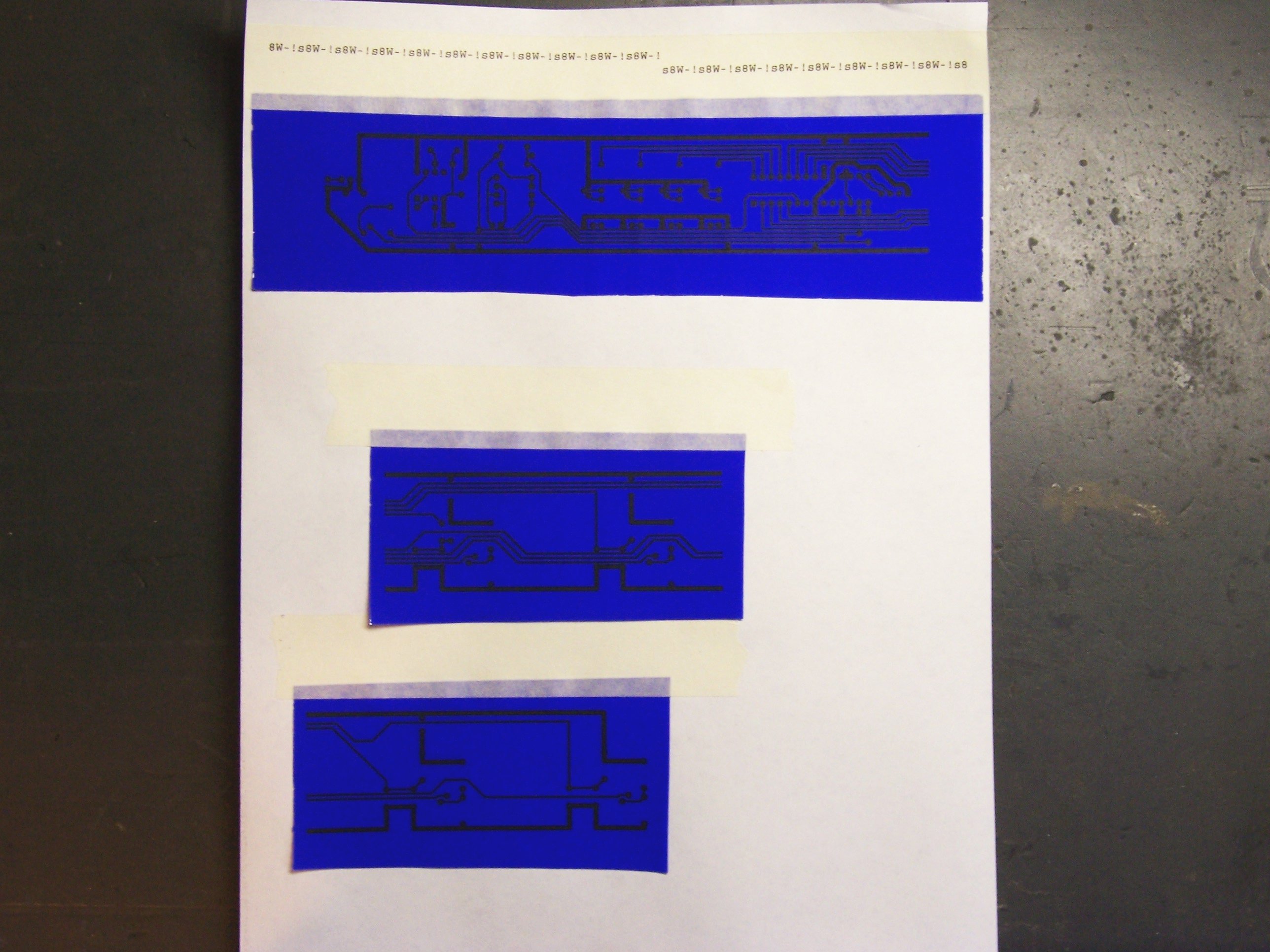
You can see across the top where my printer went nuts printing PostScript source code on the first try, but I got the design printed onto the Blue on the second try. I ironed a section of Blue onto the freshly-scrubbed PCB board, and . . .
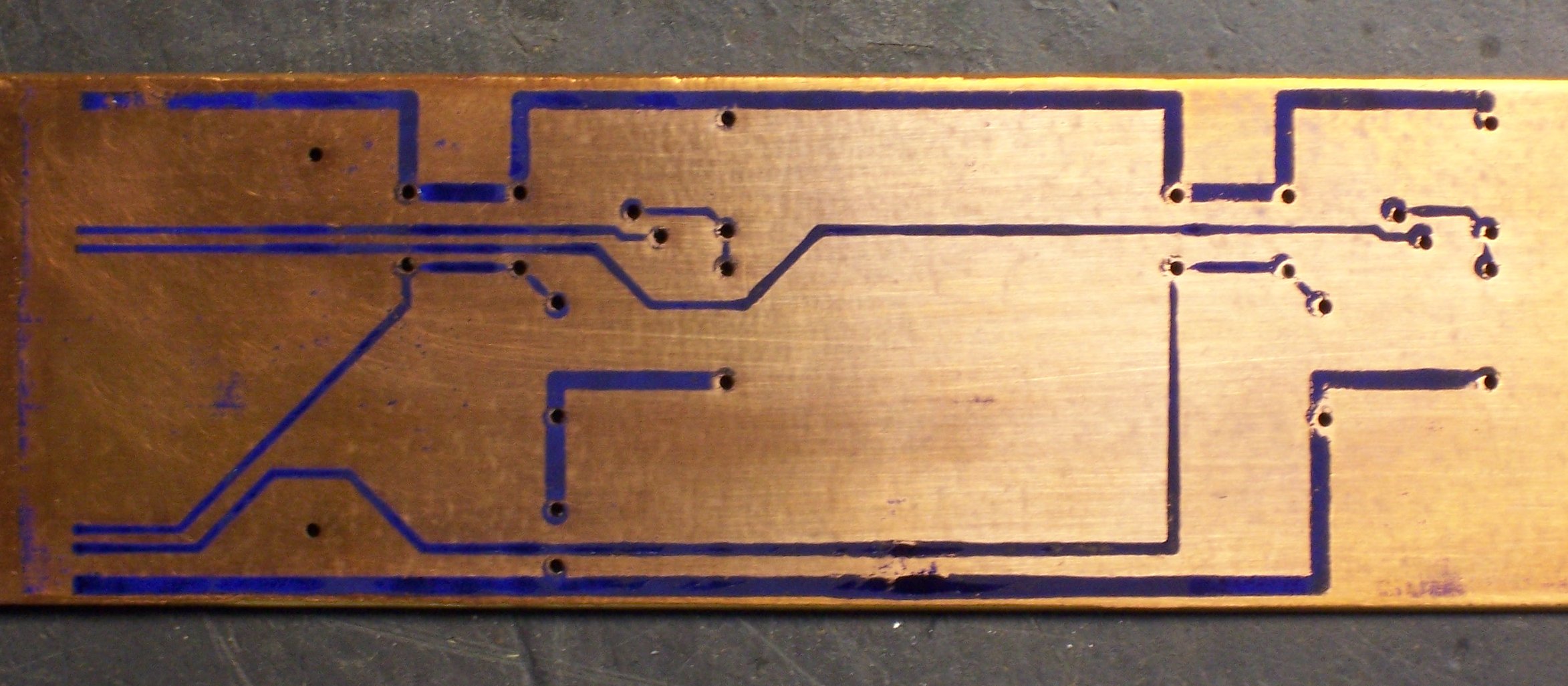
Excellent adhesion most places; terrible adhesion around the holes.
So what’s different about the holes? I think they’re dimpled from when the drill hits the copper and before it starts to bite. The surface is slightly lower, and there’s not enough pressure to adhere the Blue (or the plain-paper transfer) to the copper.
I needed something between the iron and the transfer to help distribute the pressure, even down into slight surface variations. I considered a sheet of felt, but I was afraid that it would be too soft to distribute the pressure well. I settled on a kitchen paper towel folded in half, and voila!

Good adhesion everywhere!
Lesson: Use a thin pad between the iron and the toner transfer to help distribute pressure through surface irregularities.
I had struggled for a couple of weeks to think of an appropriate etching tank for a board of this size. I needed a plastic or glass tank long enough for the board — but preferably also narrow, so as not to require a huge amount of etchant to cover the board. Finally I thought of a section of PVC pipe, capped and slit in half. $20 and a trip to the bandsaw later, I had an etching tank. (Two, actually.)
Lesson: It’s surprisingly difficult to fully seat a cap on 3″ PVC before the cement sets.

I set the tank over the bathroom sink with the ends on paper towels, in case my PVC glue joints weren’t watertight. Good thing, too, since they weren’t. By the end of the etch, one of the paper towels was stained, and I was particularly glad I’d used it.
Lesson: Use lots and lots of PVC cement to get watertight joints for odd configurations and applications.
At first, the etchant appeared to be removing quite a bit of copper, as evidenced by its increasing opacity. Half an hour in, though, not much was happening, even though I dropped by every few minutes to agitate the tank.
After a while, I got the bright idea to heat the etchant with my heat gun, and the etching really took off at that point, proceeding at a nearly visible pace.
Lesson: Heat the etchant to at least 100°F.
Once all the unwanted copper was etched away, I used a plastic fork to remove the board from the tank and rinsed it under lots of running water. Then I went to the kitchen sink to filter the used etchant into an empty plastic bottle for later reuse.
Lesson: Coffee filters pass about 1/4 cup of liquid etchant before becoming strangely impermeable.
Lesson: Impermeable coffee filters do not make particularly good funnels.
Lesson: Poor funnels tend to spill liquid over the edge into the white porcelain sink.
Lesson: Poor funnels tend to slip down inside the plastic bottle.
Lesson: The nooks at each end of capped PVC hold quite a bit of etchant that spills all over when you’re trying to pour it out.
Lesson: Start the etchant recovery process a couple of hours before your wife comes home so you have plenty of time to scrub the sink.
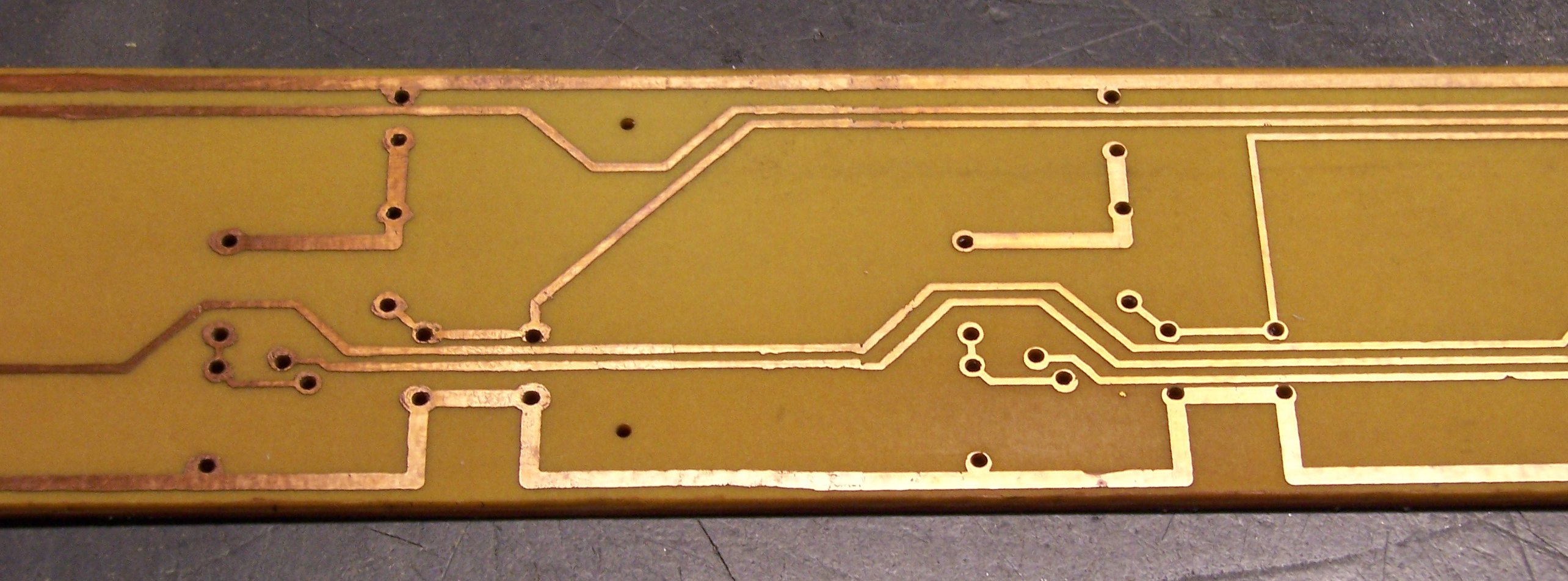
After cleaning the toner off the board with acetone, the traces really look nice. They have reasonably crisp edges and not too bad dropouts. This ended up being one of the nicer boards I’ve made by home etching.
Lesson: Try plain-paper toner transfer next time, using the paper towel pad trick.
I recently finished the prototype of my latest project (to be described in an upcoming post), and I made a lot of mistakes in PC board layout and construction. Like the SparkFun gallery of prototypes, I thought it was worth describing my problems and their solutions, to help myself and others avoid them in the future.
I’m doing that in two forms: a couple of detailed blog posts, and a new page with a summary version of the solutions. In the blog form, I’ll describe the problems in the order I encountered them; on the tips page, I’ll list the solutions in the order they’d be used when doing it right the first time.
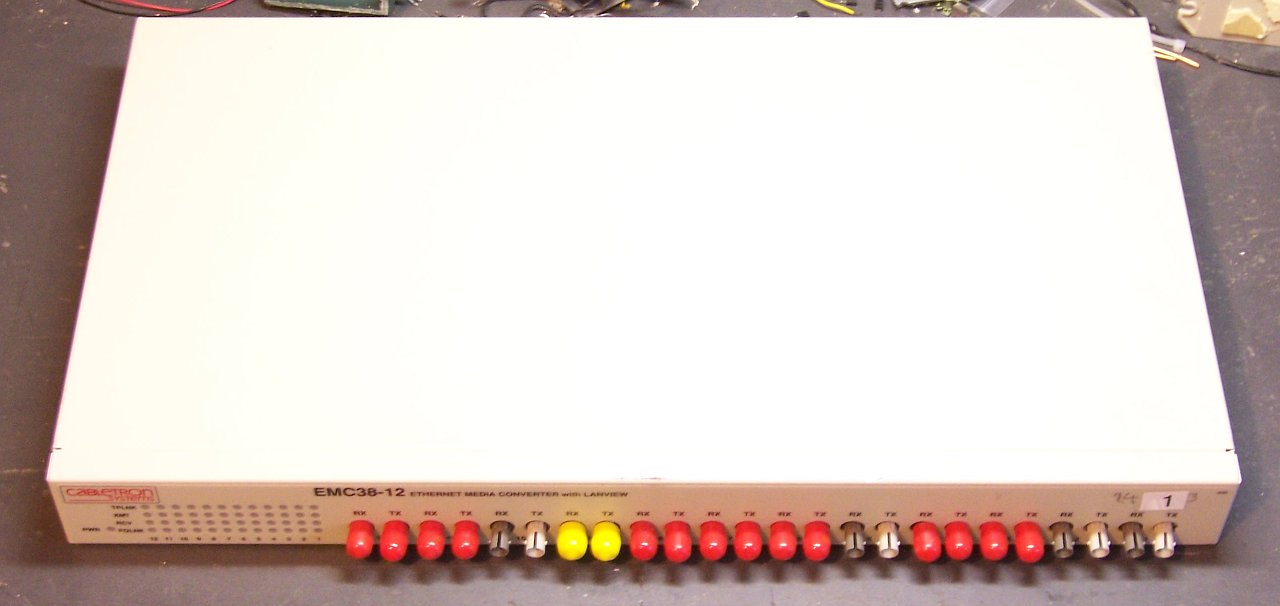
The project I’m building is a control device for my stereo system, so I wanted to build it in a rackmount case. Rackmount project boxes seem to be inordinately expensive ($40+); so for the prototype, I salvaged a piece of dead network equipment (rackmount 12-channel 10M fiber-to-copper media converter), ditched the guts, and kept the case. The power supply was on a separate board and turned out to be 5V, so I left it in place to drive my circuit.
I needed pushbuttons and indicator LEDS on the front panel, so I planned my PCB to mount behind and parallel to the front of the enclosure. I measured the outside of the case and subtracted a generous .1″ from each edge to account for the thickness of the metal and to provide clearance around the edges of the PCB.
For the prototype, I decided to use the existing holes in the front panel for my LEDs and pushbuttons. I measured their approximate distances from the lower left corner and placed the components in the PCB layout program accordingly.
First mistake: When I measured for the size of the PCB, I didn’t look closely enough at the case. Where the top cover fits into the front edge of the case, there’s an extra lip underneath. I made the first board layout too tall to fit.
Lesson: Don’t make assumptions about the fit of the case. Inspect and measure where the PCB will actually fit.
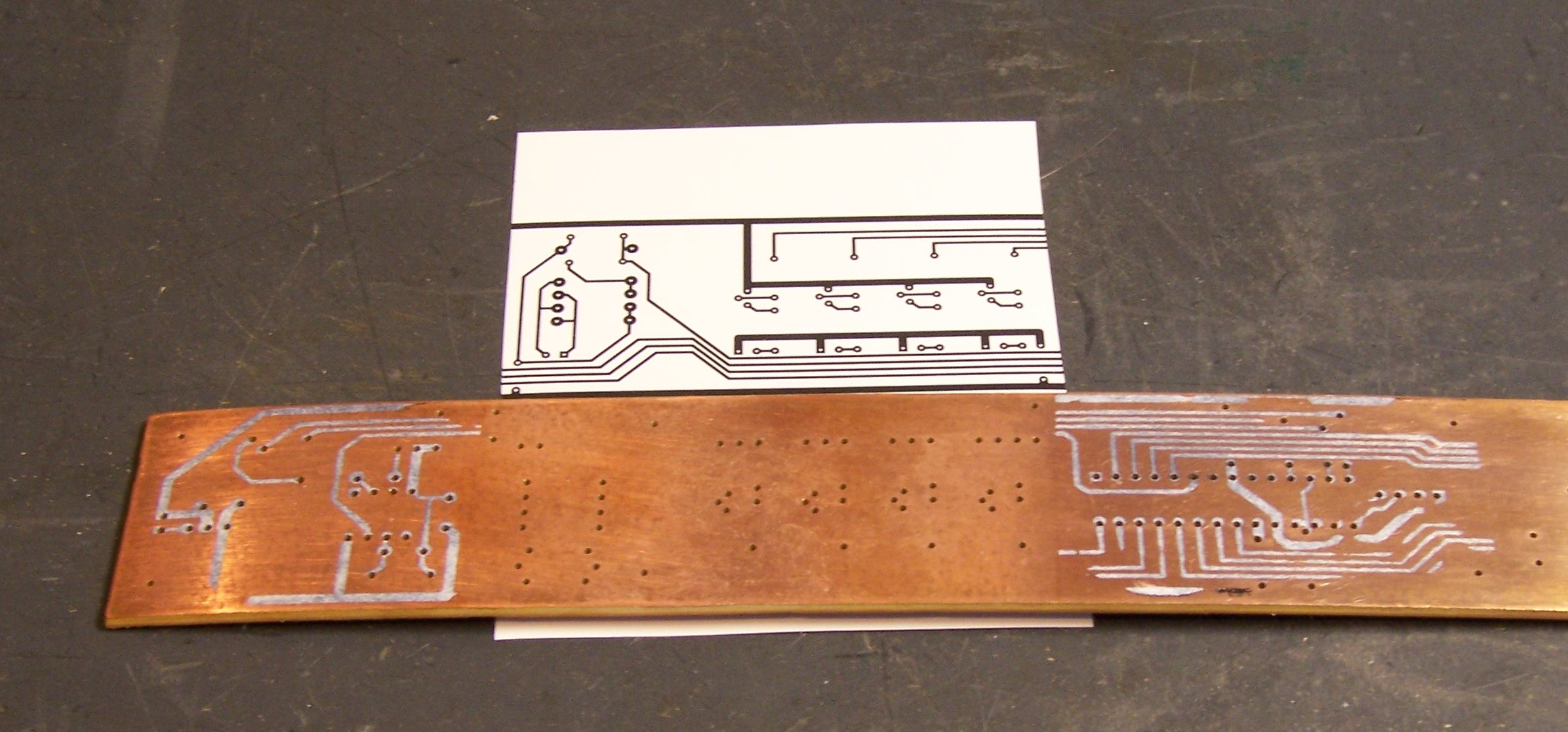
Fortunately, before making a board, I printed the silkscreen layer and board outline from the layout software (FreePCB), cut and taped the pieces together, and held it inside the case to test the fit. I realized my error at that point, and correcting it was a (relatively) simple matter of changing the board outline and moving components and traces. I also tweaked the positions of the LEDs and pushbuttons for a better fit with the front-panel holes.

Lesson: Print the board design on paper to test-fit into the enclosure before making a real board.
I could have designed most of the circuitry using 7400-series digital logic, but some of the override functions I wanted to provide on the front panel would have got tricky, so I used a PIC microcontroller running the LogoChip language.
In order to perform firmware updates, I needed to include a serial port, but I didn’t really want to clutter the back panel with something that would be used so infrequently. For my own use, I like connecting with what I affectionately call a “Cisco blue cable,” the DB-9 to RJ-45 serial cable that ships with every piece of Cisco equipment (so I have a carton full of them). That meant putting an RJ-45 jack inside the case, and the problem was where to put the jack.

Normally a jack would mount on the component side of the PC board, like the one up against the battery in my Curiously Strong LogoChip case, but here the component side was going to be pressed up against the inside of the front panel. Not only would that make the jack inaccessible (buried between the PCB and the front panel), but the jack was taller than the mounting hardware I wanted to use, and would have pushed the board too far back from the panel.
On a double-sided PC board, I could have mounted the jack on the “back” side and soldered it from the top. On my single-sided board, though, I’d have no way to solder it to the back-side traces — the jack itself would occupy the same space the soldering iron needed to.
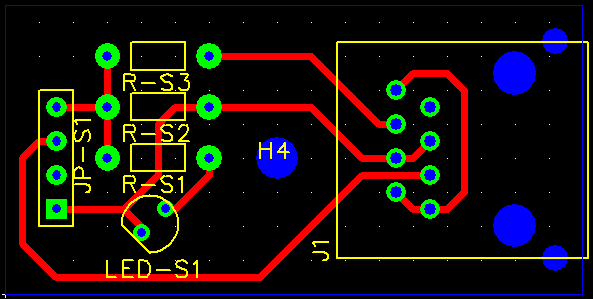
I decided to settle for making a very small daughterboard, just big enough for the jack and supporting components, to mount to a spare post in the bottom of the case. I wasn’t wild about the idea, but at least it’d get me by. In fact, I ended up scrapping the serial board idea and hooking up a temporary jack, for reasons I’ll describe later.
Lesson: Plan ahead for bulky components.
Once I (thought I) had the board design finalized, I generated an Excellon drill file to take to Joel’s house and drill on his CNC machine. Because his machine has only about 12″ of travel and I needed to drill a 16.8″ panel, I needed to split the holes into two sections, so I could rotate the board halfway through and resume drilling from the other end.
To do this, I picked a spot to divide the board where I had a relatively long run of traces with no holes nearby. That way, inevitable alignment problems could be corrected by slanting the traces from both sides to meet in the middle.
I wrote a set of scripts for selecting, rotating, translating, and mirroring hole data in Excellon drill files. (I’ll post these after I clean them up a bit.) I also wrote a script to remove Excellon tags that Joel’s DanCAM software doesn’t recognize. (I had earlier created a drill export specification to generate DanCAM from EAGLE, but I was using FreePCB due to the larger board size.) I wrote up a nice Makefile to control the whole process, so I could export new drill files and just run make to get the new copies for Joel’s machine.
I cut a strip off my giant PC board from Slim, cut a couple of sections to length, and went over to Joel’s to start drilling. I decided to drill the boards copper-side-up, so I’d have less tear-out to sand off afterward.
Lesson: Drill with the copper side up. It leaves perfectly clean holes that don’t need sanding.
I drilled the first board, and half of the third board, as a top-to-bottom mirror image of the correct hole placement. I drove back and forth across town to get more boards way too many times.
Lesson: Check drill file mirroring very carefully, to make sure it matches the placement of the board on the drill table.
I also ended up breaking something like four bits, mainly due to operator error. In the CAM software, you enter the heights of the Z axis with the drill bit up (out of the board) and down (drilled into the board). At one point, I miskeyed the up position lower than the down position, causing the machine to move the table with the bit lowered into the board. Snap. I always do a dry run before letting it drill the whole board, but it had already dived into the table before I could abort.
The machine was also drilling fairly aggressively for the size of bit I was using, resulting in the breaking of another bit. I slowed it down and didn’t break any more after that (I think).
Lesson: Be aware of CNC machining parameters, particularly those relating to position and speed.
But I didn’t start out with very many small drill bits, and each time I broke the smallest remaining one, the holes I was drilling got larger and larger. By the time I got the board finished with all the holes in the right place, I was using a 39-mil drill bit, which was way larger than I wanted — way larger than my component leads.
Lesson: Stock up on appropriately-sized drill bits.
I’ve since placed an order with Drill Bit City for a couple of 25-packs of 5 each even sizes #72 – #64.
The hole list in the Excellon drill file isn’t in any particular physical order — the hole order probably has to do with the order the parts were imported into FreePCB from the partlist. DanCAM has an optimizing stage to reorder them into a more optimal path for the slow machine to travel, but I’ve noticed in the past that its idea of optimal seemed really strange and . . . suboptimal.
This time, I caught on to what was happening. DanCAM (at least the way we’re using it) doesn’t support changing drill bits to drill different-sized holes, so I drill all the holes with the same size bit. But internally, it’s still paying attention to the drill size, and optimizing each different bit’s path as a separate pass across the board, resulting in much unneeded movement when drilling with a single bit.
I updated my FreePCB Excellon to DanCAM conversion script to reduce the drill rack to a single size bit, and the next optimization and drilling operation went much faster than before — so much so that it felt like a qualitative rather than merely quantitative difference in drilling speed.
Lesson: If you’re drilling all the holes with the same size bit, make sure the machine knows that.
Having optimized the drill path so much better than before, I noticed that the machine was occasionally drilling the same hole more than once. I knew immediately why that was: Due to a quirk in the way FreePCB routes traces, there were numerous places on my board that I had multiple logical vias at the same physical location.
I wrote a very simple drill-uniq script to remove duplicate holes:
my %seen;
while (<>) {
next if /^X/ && $seen{$_}++;
print;
}
And the drilling operation got faster yet.
Lesson: Eliminate duplicate holes from the drill file, if the CNC machine isn’t smart enough to do it for you.
My PC board production sequence is to drill the holes with the CNC machine, then print and iron on a toner transfer, then etch away the visible copper with ferric chloride. For the iron-on process to work, the predrilled holes need to align exactly with the printed copper trace pattern. I’ve noted in the past that they generally don’t align across the entire length or width of the board, and attributed that to inaccuracies in the paper feed rate of my laser printer.
This time, while I was waiting for one of several iterations of board to be drilled (due to my continuing errors), I checked the registration of the previous iteration and found it to be so bad that I got a ruler to find out exactly where the error was. It turns out that the answer was both — the drill and toner spacing were both wrong. Holding two iterations of drilled PCB up to the light revealed that the drill wasn’t even consistent from one pass to the next.
Since it’s a CNC drill, the only way that should be possible is if the steppers are skipping steps. If you push a stepper motor too fast, it skips (lags) a little bit, and stays out of sync until the next time you send it to the home position to check where it is. DanCAM’s setup process includes tests to make sure the motors are staying synchronized, but it’s pretty hard to tell if they’re losing only a few steps.
I went through the motor speed calibration section again, which boils down to running the motors faster and faster until they’re obviously losing steps, then backing off the speed until they seem stable again. I backed the speed off further than before, and on the next drill pass got all the holes as close to where they belonged as I was able to measure (except three that just randomly went a little bit off — still don’t know why, but I don’t think it was lost steps).
Lesson: Make sure the feed rates are within the steppers’ and drivers’ capacity.
At this point, I finally had a board that fit into my enclosure, with all the holes drilled (pretty much) where I wanted them. And a lot of things to remember to do better the next time.
The fan in the network switch in my home office is too loud. It’s the loudest thing in the whole room — louder than my newish and very quiet Dell PC. (Fedora, installed before ever booting the preinstalled XP Home, in case you wondered.)
I’d rather not have a switch there at all, but the DSL comes in on the ground floor (where my office is), I’ve tucked my server down in the basement, and I haven’t installed structured cabling yet. (The house is a hundred years old and the crawlspace is . . . interesting.) I need more connections going back and forth than I have cables, which means using a switch.
The Cisco switch I was using had only 100M ports, but my workstation and server both have integrated gig ethernet, so I was looking to upgrade the switch anyway.
I recently bought an old Linksys GigaSwitch EG0008 on eBay. It’s a 1U rack case with only eight gig ports on it — pretty much an antiquated beast. I was hoping it’d use passive cooling or at least have a quieter fan than my Cisco 1924.(*) Boy, was I wrong.

The Linksys has three fans, each loud. Two are in the center of the back, and there’s a separate one by the power supply. I took a little time yesterday to try to quiet it down.
I used my sound level meter (an older version of this Radio Shack meter) to measure how loud each fan was. This was a very informal test intended just to give me a general idea; and due to the range of the meter, I measured from about 10cm away instead of the standard 1m.
I unplugged two fans at a time so I could test each fan individually. The small fan in the corner was the loudest, at about 58dB. Each of the two larger fans in the back registered about 57dB. With all of them running, I got about 62dB total.
The first step was simply unplugging the two larger fans in the back. In an unventilated wiring closet, or stacked in a rack with other hot equipment, I’d want all the forced air I could get through this thing. But sitting in my office on a small stand under the base of my LCD monitor, it’s not going to get very warm. It probably doesn’t need any fans there, and one should certainly be enough.
With only the small fan plugged it, the volume dropped to slightly louder than my Cisco. Not good enough.
The small fan sounded a little rough to me, so I peeled back the sticker and added a drop of oil to its axle. It smoothed out a bit, but still not good enough.
I had another 40mm fan on hand that I bought last year from All Electronics, so I soldered a connector onto it and hooked it up to the power. Sitting out in the open, I measured it around 54dB, so it seemed to be an improvement.

The original fan wasn’t mounted with screws or bolts, but rather by snapping into position. With the replacement fan being so much slimmer, it no longer fit the slot. Since this isn’t for a ruggedized mobile application where things bounce around a lot, I just stuck it in place with hot glue.
Once in place, it measured about 58dB — the same as the original fan. Grrr.
I noticed two differences in the sound of the replacement fan between when it was sitting in the open and when it was mounted in the case. The case acted as a sounding board to amplify the fan’s noise; and there was considerable wind noise when the fan was in position. I didn’t really have room to isolate the fan from the case with rubber strips, but I did tackle the wind noise.

The ventilation holes behind the fan were not exactly what I’d call generously sized. I used my stepped drill bit to enlarge all of the holes that were in line with the fan’s blades.

After reinstalling the new fan, the overall noise level dropped to 54dB, a slight improvement over the first installation of the new fan and a considerable improvement over the original equipment.
I reassembled the switch and swapped it into service in my office, and it seems to be about as loud as the Cisco was. Interestingly, the pitch of the noise is a little different, so I notice it each time I step in the doorway. I’ll get used to it soon enough.
In retrospect, since both the original and replacement 40mm fans measured about 58dB when mounted in the case before enlarging the vent holes, I could probably put the original fan back in and have approximately the same sound level improvement.
I’d like to find a quieter fan, though. I know there’s a whole market for PC case mods with really, really quiet fans. I’ll ask around and see whether anyone I know has a tested source. So rather than go back in to reinstall the original fan, I’ll hold out for a yet-quieter replacement.
* Yes, I know the Cisco 1924 is a 10M switch. My 1924s have two 100M ports commonly used as uplinks; so at each end, one of the ports is the uplink and the other connects to the fast computer. The DSL firewall only gets a 10M port, which is faster than its WAN side anyway.